| |||||||||||||

| Заходите к нам на форум: задавайте вопросы - получайте ответы! |
|
Исследование Солнечной Системы - Марс
| |||||
 Исследователи Исследователи |
|||||
Миссии до 2012 г. |
Страница:
Космос станции,
Mars Global Surveyor (Part #1, Part #2, Part #3, Part #4, Part #5),
Mars Odyssey (Part #1, Part #2, Part #3, Part #4, Part #5, Part #6, Part #7),
Разведчик MRO (Part #1.1, Part #1.2, Part #2, Part #3, Part #4, Part #5, Part #6, Part #7, Part #8),
Mars Express (Part #1, Part #2, Part #3, Part #4, Part #5, Part #6),
Миссия Phoenix (Part #1, Part #2, Part #3.1, Part #3.2, Part #3.3, Part #3.4),
Фобос-Грунт (Part #1, Part #2, Part #3);
|
Современный этап исследований Марса в США начался с запуска в 1992 г. тяжелого и крайне дорогого аппарата Mars Observer. Гибель его на подлете к Марсу заставила запустить целую серию малых спутников Марса, которые несли на себе приборы «Обсервера»: Mars Global Surveyor (MGS, 1996), Mars Climate Observer (1999; сгорел в атмосфере Марса из-за ошибочного прицеливания) и Mars Odyssey (2001). Станция Mars Reconnaisance Orbiter значительно превосходит своих предшественников по массе и предназначена для решения новой задачи: детальной съемки одного процента поверхности Марса с выявлением объектов размером до 1 м. «С MRO мы продолжаем следовать стратегии «идти за водой», – говорит научный руководитель программы исследования Марса в штаб-квартире NASA в Вашингтоне д-р Майкл Мейер (Michael Meyer). – Драматические открытия КА Mars Global Surveyor, Mars Odyssey и марсоходов MER, недавние овраги, вечная мерзлота вблизи поверхности и вода на поверхности в прошлом открыли нам за последние несколько лет новый Марс. Выяснив, что произошло с этой водой, мы определим стратегию поиска возможной марсианской жизни сейчас или в прошлом».  Научные задачи проекта MRO сформулированы следующим образом: Научные задачи проекта MRO сформулированы следующим образом:
- Улучшить понимание современного климата Марса, процессов, которые формировали и изменяли поверхность планеты, и степени участия в них воды. - Выявить места, где возможные эффекты жидкой воды указывают на условия, которые могли способствовать биологической активности, или где жизнь может существовать в настоящее время. - Выявить и охарактеризовать места для будущих посадок на Марс. Для их решения необходимо произвести следующие исследования:
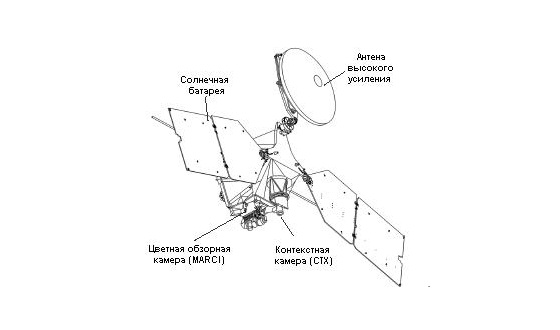
- оценить сезонные и суточные вариации воды, пыли и CO2 в атмосфере; - охарактеризовать глобальные изменения структуры атмосферы и поверхности; - произвести поиск мест с признаками воды или гидротермальной активности; - изучить детальную стратиграфию, геологическую структуру и состав деталей поверхности Марса; - изучить подповерхностные слои Марса на предмет наличия слоев, резервуаров льда или воды, а также изучить внутреннюю структуру полярных шапок; - картировать и отслеживать гравитационное поле Марса, чтобы улучшить знания о его коре и установить вариации массы атмосферы; - выявить и охарактеризовать места для будущих посадок на Марс с высоким потенциалом открытий. Конечно, нет необходимости и нет возможности отснять весь Марс с высоким разрешением. Реально MRO будет иметь три режима работы: повседневный глобальный обзор, региональные обзоры и целевые детальные наблюдения. Проект MRO был утвержден к реализации 26 октября 2000 г. Руководит им Лаборатория реактивного движения Калифорнийского технологического института, а финансирует Директорат научных миссий NASA. 3 октября 2001 г. контракт на проектирование, изготовление, испытания аппарата и управление им в полете получила компания Lockheed Martin Space Systems. В Лаборатории реактивного движения за проект отвечают менеджер Джеймс Граф (James Graf) и научный руководитель д-р Ричард Зурек (Richard Zurek). В штаб-квартире NASA в Вашингтоне, соответственно, д-р Рамон ДеПаула (Ramon DePaula) и д-р Стивен Саундерс. Менеджером программы на Lockheed Martin является Кевин МакНейлл (Kevin McNeill). MRO имеет корпус довольно сложной формы, к которому на двух штангах крепятся панели солнечных батарей, а на третьей – крупная остронаправленная антенна. Высота аппарата достигает 6.5 м, диаметр антенны – 3 м, размах солнечных батарей – 13.6 м, площадь каждой – 2.53x5.35 м. Сухая масса аппарата – 1031 кг, из которых 139 кг приходится на научную аппаратуру. Масса топлива для бортовых двигателей и газа наддува – 1149 кг. Стартовая масса – 2180 кг. Основные материалы конструкции – титан, алюминиевые сотовые панели и углеродные композиты. Источником электропитания КА являются две солнечные батареи, на каждой из которых установлено по 3744 фотоэлемента с суммарной площадью 9.5 м2 и эффективностью 26%. Каждая из них имеет привод для ориентации на Солнце. Вблизи Земли две батареи производят около 6000 Вт, а на орбите вокруг Марса – не менее 2000 Вт. Две никель-водородные аккумуляторные батареи обеспечивают питание при нахождении станции в тени.
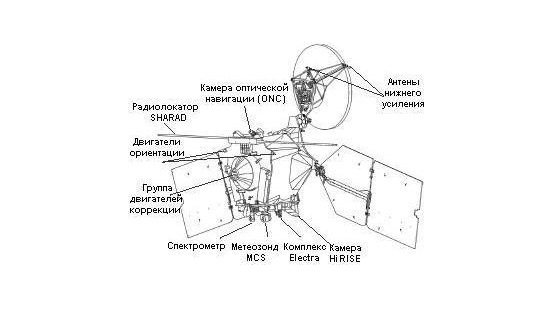
В состав бортовой двигательной установки входят 20 двигателей. Шесть из них (модель MR-107E компании Aerojet, изготовлены в 2001 г. для отмененной миссии Mars Lander 2001) имеют тягу по 38 фунтов, или 170 Н. Они предназначены для первой коррекции и для торможения у Марса и выхода на орбиту вокруг него, причем использование шести малых двигателей вместо одного большого снижает вероятность отказа. Еще шесть двигателей MR-106E имеют тягу по 5 фунтов (22 Н) и используются для остальных коррекций траектории. Восемь малых ЖРД стабилизации и ориентации имеют тягу по 0.2 фунта (0.9 Н). Запас гидразина хранится в баке емкостью 1220 кг, наддуваемом гелием. Система навигации и управления использует данные с двух звездных датчиков (один из них запасной), определяющих точную фактическую ориентацию по картине звезд в поле зрения прибора, и 16 солнечных датчиков (из них 8 запасных). Дублированный инерциальный измерительный блок и кольцевые лазерные гироскопы определяют линейные ускорения и угловые скорости аппарата. Исполнительными устройствами являются три маховика массой по 10 кг, оси которых расположены под прямыми углами друг к другу, плюс запасной четвертый. Разгрузку маховиков обеспечивают микродвигатели, которые также могут быть применены для разворота КА. Основой подсистемы команд и обработки данных служит бортовой компьютер производительностью 48 млн инструкций в секунду с процессором X2000 Rad 750 (который представляет собой радиационно-стойкий вариант процессора PowerPC на 133 МГц) и 128 Мбайт оперативной памяти. Бортовое запоминающее устройство для хранения научных данных в промежутках между сеансами связи имеет емкость 160 Гбит. В состав подсистемы связи входят: остронаправленная антенна HGA и две ненаправленные антенны LGA, размещенные на ней с обеих сторон; два усилителя на диапазон X мощностью по 100 Вт и усилитель на диапазон Ka мощностью 35 Вт; а также два приемопередатчика. Последние способны работать в двойном режиме: передавать аналоговый сигнал для допплеровских измерений скорости и одновременно инициировать цифровой ответ КА при получении команд с Земли. Благодаря мощным передатчикам и большому диаметру антенны пропускная способность радиолинии теоретически достигает 5.6 Мбит/с. Практически она ограничивается способностью приемных средств на Земле, но даже с учетом этого будет на порядок выше, чем у предыдущих марсианских КА. Планируется, что передача будет осуществляться ежесуточно двумя восьмичасовыми сеансами на 34-метровые антенны Сети дальней связи. В зависимости от расстояния между Марсом и Землей они смогут принимать от 600 до 2600 кбит/с. В период нахождения Марса в афелии будут привлекаться и 70-метровые антенны, что обеспечит канал в 3500 кбит/с. Все это позволит за 25 месяцев передать от 26 до 34 терабит информации. Между прочим, это в пять раз больше, чем было получено от всех остальных американских аппаратов для исследования Марса вместе взятых! Если же тестирование передатчика Ka-диапазона пройдет успешно, количество передаваемой информации может быть еще больше. Подготовка к пуску MRO Аппарат MRO был доставлен на мыс Канаверал с завода-изготовителя Lockheed Martin вблизи Денвера 30 апреля 2005 на военно-транспортном самолете C-17. Окончательная сборка и испытания проводились в Корпусе обслуживания опасных ПН в промзоне Космического центра имени Кеннеди. Пик их пришелся на май–июнь. Так, 21 мая завершились испытания связного комплекса совместно со станцией MIL-71 на мысе Канаверал. 24 мая 2005 закончился функциональный тест радара SHARAD, а 25 мая 2005 прошел тест привода антенны HGA. На следующий день на борт поставили ретрансляционный комплекс Electra, а 27 мая он был испытан. 6 июня станция получила свои летные аккумуляторные батареи. 14 июня автономные испытания были закончены. 24 июня на MRO установили антенну HGA, а 28 июня – солнечные батареи. Их опытное развертывание провели 2–3 июля. Ракету Atlas 5 номер AV-007 привезли из Денвера на мыс Канаверал двумя рейсами транспортного самолета Ан-124: 29 марта доставили блок Centaur, а 31 марта – первую ступень. Вскоре, однако, Centaur пришлось отправить обратно, и вновь он прибыл на космодром лишь 6 июня. Горизонтальные испытания ступеней были проведены в МИКе ASOC, который находится в 6.5 км от стартового комплекса. 6 мая 2005 первую ступень передали в Корпус вертикальной сборки VIF в 550 м от старта; Centaur последовал за ней 17 июня. После стыковки ступеней и вертикальных испытаний Atlas 5 был вывезен на старт, где 7 июля состоялся пробный отсчет с заправкой всех ступеней ракеты. На отметке T-4 мин были зарегистрированы очень медленные колебания давления в водородном баке 2-й ступени. Пришлось заменить регулирующий клапан, и, чтобы убедиться в его нормальной работе, 19 июля пробный отсчет повторили.
Тем временем состоялась заправка топливного бака MRO гидразином (18 июля) и балансировка аппарата (20 июля). 22-го аппарат был соединен с адаптером, 25-го укрыт обтекателем, а 28 июля доставлен в Корпус вертикальной сборки и состыкован с носителем. Функциональный тест КА 1 августа и совместные испытания с носителем прошли штатно. Астрономическое окно для запуска MRO продолжалось с 10 августа до 5 сентября 2005 г. Старт был назначен на 10 августа в 07:54 EDT (11:54 UTC). Стартовое окно продолжалось 1 час 45 мин. Вывоз носителя из Корпуса вертикальной сборки на старт планировался на 9 августа в 23:00 EDT. Однако за несколько часов до этого было объявлено об отсрочке запуска. Причиной стали подозрения в адрес двух блоков скоростных гироскопов RRGU в системе управления «Атласа». Похожее устройство отказало при испытаниях на заводе-изготовителе, и нужно было еще раз убедиться, что гироскопы на ракете AV-007 кондиционны. 10 августа они были проверены, и старт назначили на 11 августа в 07:50 UTC. Вывоз мобильной стартовой платформы с носителем на старт начался в 22:46 и закончился в 23:30 EDT – за 8 часов до расчетного времени пуска. Подготовку к старту сильно задержала плохая погода; около пяти утра в миле от стартового комплекса ударила молния. Последовала получасовая отсрочка старта, потом еще одна, потом 10-минутная. А затем возникла техническая неисправность: в 07:58 заправка водородного бака ступени Centaur была прервана из-за неожиданных показаний датчиков. В общем-то повторилась история с шаттлом «Дискавери»: часть датчиков показали наличие водорода, а другие – нет. Запуск отложили до 09:35, до последней минуты стартового окна. Почти час стартовый расчет пытался «перехитрить» датчики и программу заправки и возобновить процесс. В 08:50 стало ясно, что успеть не удастся, и старт был отменен. Причиной же оказался тот самый удар молнии… Следующая попытка была назначена на 12 августа в 07:43 EDT с двухчасовым стартовым окном. Этим утром все операции прошли по плану, и старт состоялся в назначенное время. 15 августа закончился первый этап приемки КА в полете и началась фаза перелета, которая продлилась до января 2006 г. и сменилась фазой сближения с Марсом. В последний день «приемки» в 15:12:56 UTC аппарат провел камерой MARCI тестовую съемку Земли и Луны, для чего потребовалось развернуться на 15° относительно штатной ориентации. Данные были записаны на борту и переданы на Землю. В момент съемки Земля находилась в 1.17 млн км от MRO, а Луна – в 1.44 млн км. С такого расстояния их изображения имели размер от одного до пяти пикселов, однако этого было достаточно для анализа работы MARCI во всех спектральных диапазонах. На 30 августа было запланировано первое включение остальных приборов MRO. 27 августа 2006 была проведена первая коррекция траектории (TCM-1). Целью ее был переход с отлетной траектории, преднамеренно направленной на 80000 км в сторону от Марса, на траекторию близкого пролета планеты, а также опробование двигателей, которые будут тормозить станцию у Марса. Подготовка к этой коррекции началась 24 августа, когда была открыта подача топлива из бака к двигателям. 25 августа был утвержден набор команд для коррекции, и за два часа до нее он начал исполняться. Аппарат провел разгрузку маховиков, переключился на малонаправленную антенну LGA2 и выполнил разворот в направлении выдачи импульса. Маневр начался с включения на 30 секунд шести 5-фунтовых двигателей для осаждения топлива в баке, а затем, в 22:00 UTC, попарно с интервалами в 2 секунды были включены шесть наиболее мощных 38-фунтовых ЖРД. Стабилизацию по каналу вращения обеспечивали микродвигатели. Коррекция продолжалась 15 секунд; после нее аппарат успешно вернулся в штатное положение. Измерения показали, что маневр выполнен точно. Приращение скорости составило 7.8 м/с; сама же гелиоцентрическая скорость составляла 32856 м/с. Материал:
| ||||||||||||


|
|