| |||||||||||||

| Заходите к нам на форум: задавайте вопросы - получайте ответы! |
|
Исследование Солнечной Системы - Марс
| |||||
 Исследователи Исследователи |
|||||
Миссии после 2012 г. |
|
Марс - красная звезда
ExoMars По дороге к Марсу: проверки аппаратуры
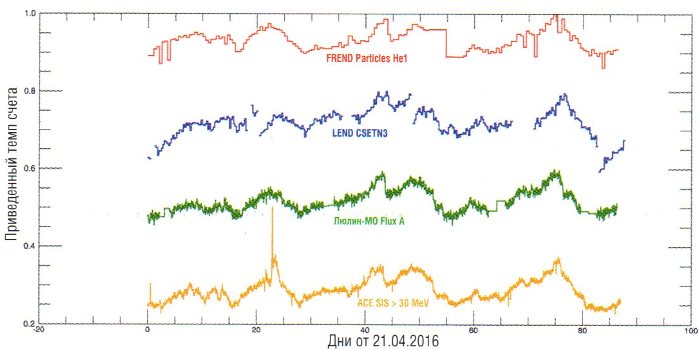
Как известно, комплекс ExoMars2016 был выведен на траекторию полета к Марсу 14 марта 2016 г. с Байконура с использованием российской PH «Протон-М» с разгонным блоком «Бриз-М». Спустя трое суток специалисты Европейского центра космических операций ESOC в Дармштадте завершили этап начальных операций и перешли к двухнедельной стадии ввода TGO в эксплуатацию. В этот период были проверены системы электропитания, управления, ориентации, навигации и связи КА и налажен регулярный контакт с Землей через бортовую остронаправленную антенну диаметром 2.2 м со скоростью передачи данных 2 Мбит/с. Эта фаза полета также завершилась успешно; первую коррекцию траектории, планировавшуюся на 21 марта, проводить не стали, так как отклонения ее от расчетной были минимальны. Следующие три недели были посвящены проверкам научной аппаратуры. 4-7 апреля состоялись первые включения научных инструментов TGO с целью функциональной проверки всех узлов приборов и их работы в основных режимах. В частности, 5 и 6 апреля проводились проверки двух российских приборов разработки ИКИ РАН - комплекса спектрометров ACS (научный руководитель -д.ф.-м.н. О. И. Кораблёв) и нейтронного детектора FREND (научный руководитель -д.ф.-м.н. И. Г. Митрофанов) вместе с входящим в его состав болгарским дозиметрическим модулем «Люлин-МО». Необходимая для оценки научная телеметрия поступала из ESOC в ИКИ посредством специализированной системы распространения данных DDS (Data Dissemination System). Оба прибора были найдены в исправности, объем и содержание получаемых данных соответствовало ожиданиям.
Первый снимок звездного неба европейской камерой высокого разрешения CaSSIS был сделан 7 апреля. 8 и 9 апреля специалисты итальянского подразделения Thales ALenia Space проверяли состояние систем и приборов посадочного модуля EDM. Был также включен и проверен американский ретранслятор УКВ-диапазона Electra для радиообмена с роверами и посадочными аппаратами на Марсе.
За первичной проверкой последовали комплексные калибровки, включающие наведение спектрометрической аппаратуры на Солнце и работу по прямому солнечному излучению. Европейский прибор NOMAD произвел растровое сканирование солнечного диска в каналах UVIS и LNO вечером 11 апреля, а 13-15 апреля выполнялись наблюдения прямого солнечного излучения и его измерения с высоким спектральным разрешением приборами комплекса ACS. По экспериментальным данным были подтверждены оптические характеристики приборов ближнего, среднего и теплового диапазонов, выполнены первые спектральные и радиометрические калибровки, определены направления полей зрения каждого из каналов. По завершении сеансов работы научную аппаратуру перевели в «спящий» режим. 22 апреля в 13:15 UTC прибор FREND был включен в режим постоянной работы. С этого момента и до подлета к Марсу радиационные измерения вели датчики «Люлина-МO», а также два из пяти нейтронных детекторов основного инструмента (один пропорциональный гелиевый счетчик и сцинтиляцион-ный счетчик), регистрирующие нейтронные потоки в широком диапазоне энергий. Радиационные данные в спокойные периоды и во время солнечных вспышек необходимы для планирования будущих миссий на Марс, в том числе пилотируемых. 24 апреля этап проверок и испытаний служебных систем и научных приборов TGO и Schiaparelli закончился. Начался относительно «спокойный» этап межпланетного перелета. Нa июнь планировалась вторая и последняя серия калибровки и проверки конфигурации научной аппаратуры, так называемый Mid Cruise Checkout. В отличие от первой, где команды выдавались в режиме реального времени, она была организована как автономно выполняемая программа, которую составили в наземном научном сегменте проекта ExoMars в Европейском центре космической астрономии ESAC в Мадриде и загрузили на борт для исполнения 8 июня со станции Нью-Норсия в Австралии. Прием данных, как и при реальной работе у Марса, вели три станции дальней космической связи в Южном полушарии - европейские Нью-Норсия и Маларгуэ (Аргентина) и американская в районе Канберры (Австралия).
В рамках этой кампании 13 июня камера CaSSIS сделала первый снимок Марса. Расстояние до цели составляло 41 млн км, угловой диаметр планеты равнялся 34", поэтому диск Марса соответствовал лишь примерно 15 элементам изображения, а разрешение было оценено в 460 км. Тот факт, что в момент съемки к камере было обращено вулканическое плато Фарсида, на изображении не читался, однако заместитель научного руководителя Антуан Поммероль (Antoine Pommerol) отметил хорошую фокусировку и высокую чувствительность инструмента.
С 14 по 16 июня на спектрометрическом комплексе ACS было проведено более 40 научных сеансов, включая наведение на Солнце, а также калибровку по космосу и внутреннему черному телу. Помимо регистрации спектров и записи научных данных, выполнялись работы по исследованию тепловых режимов внутри каждого из приборов, в том числе контролируемое захолаживание. Проверялись также измеряемые электрические характеристики аппаратуры. Замечаний не было.
FREND включил все неработавшие нейтронные детекторы и провел ряд проверок функционирования, а также калибровочные измерения в различных конфигурациях. Проверка показала, что все детекторы прибора функционируют штатно и готовы к началу измерений нейтронного потока на Марсе. По окончании программы FREND оставили включенным для продолжения радиационных измерений. 15-17 июня были проверены два основных инструмента посадочного модуля -десантная камера DECA и метеокомплекс DREAMS. Прицеливание
28 июля в соответствии с планом полета состоялась главная коррекция траектории DSM-1 с использованием маршевого двигателя S400-15 тягой 424 Н (43.2 кгс). Подготовка к маневру заняла две недели. Расчетное приращение скорости - 334.176 м/с (До маневра называлось иное расчетное значение - 326.497 м/с) - было определено в результате продолжительных высокоточных навигационных измерений дельта-дифференциальным методом DDOR, позволяющих установить текущее положение КА с точностью до 1 км. 13 июля по командам операторов ESOC был выполнен подрыв пироклапанов и наддув гелием баков двигательной установки. 15 июля на борт заложили программу для пробного включения маршевого двигателя DSM-0 с приращением скорости 1 м/с, которое было запланировано на 18 июля в 11:00 UTC, однако не получилось из-за ошибки в конфигурации систем. При второй попытке 21 июля двигатель отработал штатно. Программа основного маневра была заложена на борт 26 июля. Выполняя ее, аппарат убрал и зафиксировал остронаправленную антенну, обезопасил аналогичным образом солнечные батареи и построил необходимую ориентацию на маховиках. Маршевый двигатель включился 28 июля в 09:30 UTC, проработал 52 минуты и отключился по набору необходимой скорости; его работу с неизбежной задержкой на 4 мин 38 сек отслеживала наземная станция Нью-Норсия, принимая сигнал несущей частоты, идущий с борта через ненаправленную антенну LGA. Наблюдение за допплеровским изменением частоты позволило подтвердить штатное включение и выключения двигателя. По первым данным маневр был выполнен очень точно: двигатель недоработал всего 0.01%. Тщательные навигационные измерения, проведенные по 7 августа включительно, показали, что ошибка в величине приращения скорости составила всего 5 мм/с, а в направлении - 0.167°.
Коррекция 28 июля имела целью обеспечить заданное время прибытия в близкую окрестность Марса и минимизировать суммарное потребление топлива во время последующих маневров, включая выдачу тормозного импульса для перевода TGO на начальную высокоэллиптическую орбиту спутника планеты. Нy, если быть более точным, в программу маневра заложили 95% необходимого для этого приращения скорости, а остаток «добили» 11 августа в ходе малого маневра DSM-2. В этот день маршевый ЖРД также включился в 09:30 UTC и проработал 155 сек, выдав расчетное приращение скорости 17.712 м/с с ошибкой в 20 мм/с по величине и 0.262° по направлению. Особенность маневра DSM-2 заключалась в том, что он одновременно был репетицией главного маневра выхода на орбиту вокруг Марса. От последнего зависела судьба проекта, и разработчики старались устранить все возможные помехи этой операции. Стандартную во время перелета реакцию КА на неполадки на борту - переход в защитный режим и ожидание помощи с Земли - нужно было заблокировать. Соответствующий вариант бортовой программы и отрабатывался 11 августа. Еще одно отличие состояло в том, что для разворота КА в позицию для маневра и удержания ориентации во время работы двигателя использовались ЖРД малой тяги, а не маховики: это значительно быстрее. Российский прибор FREND был отключен 15 сентября, когда началась подготовка к прибытию к Марсу. Первую подлетную коррекцию траектории ТСМ-3, запланированную на 19 сентября, отменили; вместо нее в этот и последующие дни проводились испытания УКВ-передатчика посадочного аппарата. Вторую и последнюю коррекцию ТСМ-4 выполнили 14 октября, за пять суток до прилета. Двигатели малой тяги были включены в 08:45 UTC примерно на минуту и отработали расчетное приращение скорости - всего 14 мм/с. Руководитель полета Мишель Дени (Michel Denis) сообщил, что двигатели чуточку переработали, однако никаких последствий это иметь не будет. Три последних дня
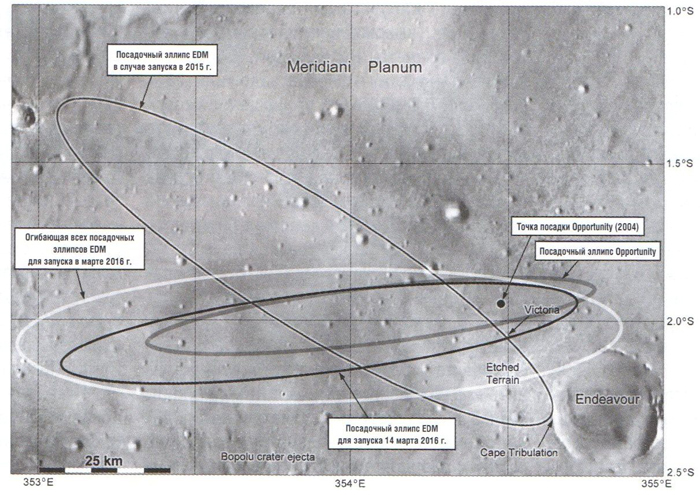
Эти коррекции имели целью направить всю связку TGO+EDM в расчетную точку входа в атмосферу Марса. Почему всю? Да потому, что это позволяло существенно упростить конструкцию посадочного модуля: не оснащать его собственной двигательной установкой и сложными системами навигации и ориентации. Основной аппарат выводит посадочный зонд в расчетную точку входа под правильным углом к горизонту, а посадочный модуль стабилизируется вращением: дешево и сердито! А после этого главное - вовремя увести TGO с траектории попадания. Точка и время входа были определены с таким расчетом, чтобы посадка произошла в избранном районе поверхности Марса. Им стала равнина Меридиана, где с января 2004 г. и по настоящее время работает американский марсоход Opportunity. Более того, размер (15x100 км) и положение посадочного эллипса для EDL после переноса даты старта на 14 марта почти точно совпали с теми, что использовались 13 лет назад. Американский ровер за это время успел уйти из пределов эллипса и работает сейчас в кратере Индевор, так что вероятность «прямого попадания» была минимальна, но не попытаться заснять садящийся аппарат операторы Opportunity не могли. Правда, безрезультатно. Итак, для попадания в заданный район посадки EDM должен был войти в атмосферу Красной планеты 19 октября в 14:42 UTC по бортовому времени. От этой точки планировались предшествующие операции: - Примерно за 84 часа до входа, 16 октября в 02:42 UTC земного времени, на борт закладывается окончательная программа отделения, входа и посадки; - За 72 часа до входа, 16 октября в 14:42 UTC, на расстоянии около 6 млн км от Марса выполняется отделение EDM; - За 60 часов до входа, 17 октября в 02:42 UTC, выполняется увод TG0 на пролетную траекторию; - За 57 часов до входа, 17 октября в 05:42 UTC, TGO начинает выполнять программу выхода на орбиту. На вход и посадку EDM плотно накладывалась собственная программа TGO, которая предусматривала выдачу тормозного импульса в период с 13:04 по 15:31 UTC бортового времени. В это время основной аппарат должен был записывать телеметрический сигнал с посадочного модуля, но не имел возможности передавать ее на Землю в реальном масштабе времени. Европейский орбитальный аппарат Mars Express, оснащенный специальным радиокомплексом Melacom, дублировал TGO в части записи сигнала с EDM, но мог регистрировать только несущую частоту. Его рабочее «окно», определяемое текущими параметрами орбиты, продолжалось с 13:22 до 15:08 UTC. Передача записанного сигнала на станцию Себрерос в Испании планировалась начиная с 15:39. По проекту мощность передатчика EDM не позволяла вести передачу напрямую на Землю, так что оперативный мониторинг посадки казался невозможным. Оказалось, однако, что индийский радиотелескоп-интерферометр метрового диапазона GMRT (Giant Metrewave Radio Telescope) в г. Пуне, состоящий из 28 антенн диаметром по 45 м, на пределе чувствительности способен принять и выделить из шумов слабый сигнал от Марса! Американская JPL установила в Индии приемную аппаратуру, чтобы Пуне могла обеспечивать поддержку «ЭкзоМарсу». Поскольку главной задачей посадочного аппарата EDM была отработка процесса торможения в атмосфере Марса и посадки, а также используемых при этом приборов и программных средств, продолжительная работа на поверхности не планировалась. Поэтому зонд не имел ни солнечных батарей, ни радиоизотопных источников питания. В составе перелетного комплекса питание и обогрев обеспечивал TGO, а на заключительном этапе полета лэндер должен был работать от аккумуляторных батарей. Чтобы максимально использовать их заряд, EDM отделялся в пассивном, «спящем» состоянии и активировался по таймеру за 75 мин до входа в атмосферу Марса. В 14:48 он должен был совершить посадку на Марс и еще через 15 минут отключиться и «заснуть». Разработчики надеялись, что зонд проживет на поверхности как минимум двое суток, вероятно - четверо, до 23 октября, а может быть, и до десяти. Чтобы растянуть этот срок до предела, работу служебных систем и метеокомплекса DREAMS запланировали отдельными циклами с перерывами на «сон» в периоды отсутствия связи, так что в течение каждых суток аппарат функционировал примерно по б часов. Предусматривалось 14 сеансов передачи информации через Mars Express, 18 - через американский спутник MRO, восемь - через Mars Odyssey и шесть - через MAVEN.
3 и 7 октября с Земли были переданы на TGO, а от него - «пассажиру» два набора команд, обеспечивающих автономную работу EDM. В первой посылке передавались уставки таймера и циклограмма работы научной аппаратуры на поверхности. Все остальное ушло на борт во второй посылке. 11 октября была проведена дозарядка батарей EDM. С 9 октября европейский наземный комплекс в лице Центра управления в Дармштадте и станций Нью-Норсия и Маларгуэ обеспечивал сопровождение «ЭкзоМарса» 24 часа в сутки. В полночь на субботу 15 октября группа управления заняла места в большом зале Центра, чтобы сделать последние оценки состояния и провести высокоточные навигационные определения в режиме Delta-DOR. Утром 16 октября EDM, все еще состыкованный с TGO, был включен. Работая через станцию Нью-Норсия, операторы при помощи экспертов из итальянского подразделения Thales ALenia Space проверили состояние систем посадочного аппарата и наличие на борту правильной программы. За полтора часа до разделения TGO построил необходимую ориентацию, сбросил накопленный маховиками момент и в 14:42 UTC в соответствии с планом произвел отстрел EDM. Три мощные косо установленные пружины оттолкнули 577-килограммовый аппарат с относительной скоростью 0.37 м/с, одновременно закрутив его вокруг оси симметрии с угловой скоростью 2.75 об/мин.
Чтобы удар от разделения не повредил остронаправленную антенну TGO, она была запаркована 20 минутами раньше, и КА передавал лишь сигнал несущей частоты через ненаправленную антенну LGA. Принимая его через две 70-метровые американские антенны под Канберрой и Мадридом, операторы ESOC получили подтверждение разделения по характерному изменению частоты сигнала через 9 мин 40 сек после события. TGO благополучно погасил возмущения от разделения и около 15:15 должен был вернуться в штатный режим передачи. Аппарат действительно переключился на остронаправленную антенну, однако по-прежнему передавал лишь сигнал несущей, без телеметрической информации. Благодаря принятым мерам к 16:43 прием телеметрии на станции Маларгуэ был восстановлен, и вскоре TGO ретранслировал информацию с EDM, записанную в процессе разделения. Эти данные подтвердили, что посадочный зонд отключился и «заснул» в заданное время, как и планировалось. Помимо этого, в 14:52:34 UTC сигнал УКВ-передатчика EDM был принят 18 сфазированными антеннами индийского радиотелескопа в Пуне. Прием продолжался до 15:06:31; таким образом, критически важный эксперимент прошел успешно. 17 октября в 02:42 UTC маршевый двигатель TGO был включен на 106 сек для выдачи бокового импульса величиной 11.6 м/с. Нужно было немного изменить направление полета, чтобы в итоге не попасть в Марс, а пройти на высоте 300 км над ним. В 02:59 «Земля» вновь приняла сигнал, и вскоре заместитель руководителя полета Миха Шмидт (Micha Schmidt) объявил, что маневр ORM прошел успешно. После этого операторы перевели TGO в специальный режим игнорирования мелких неисправностей. В ночь на 18 октября на борт TGO загрузили программу выхода на орбиту вокруг Марса, и в 05:35 борт подтвердил ее прием. Успех и почти успех
Настало 19 октября - момент истины для разработчиков, операторов и ученых. Как сказал по этому поводу менеджер проекта ExoMars Дон МакКой (Don McCoy), «люди вложили в это дело свои сердца и души. Мы готовы. Спасибо всем вам».
Работая в автономном режиме, TGO зафиксировал остронаправленную антенну и солнечные батареи. В 12:30 бортового времени он начал разворот в расчетную ориентацию для торможения и в заданный момент, 13:04:47 UTC, включил свой маршевый двигатель, который должен был за 143 минуты снизить скорость КА примерно на 1550 м/с. Как и в предыдущих случаях, «Земля» отележивала включение и работу двигателя по изменению частоты принимаемого сигнала. Он доходил до Земли за 9 мин 47 сек, так что уже в 13:15 в Дармштадте знали, что все идет по плану. Сигнал принимали Нью-Нор-сия и американская 70-метровая антенна DSS-43 под Канберрой, готовились принять эстафету станции Европы и США в Испании и Маларгуэ в Аргентине. В экспериментальном режиме работали также две российские станции в Калязине и Медвежьих Озерах. Ход допплеровской кривой показывал, что двигатель TGO дает тягу на 1.6% выше расчетной. Это означало, что он должен отключиться минуты на три раньше.
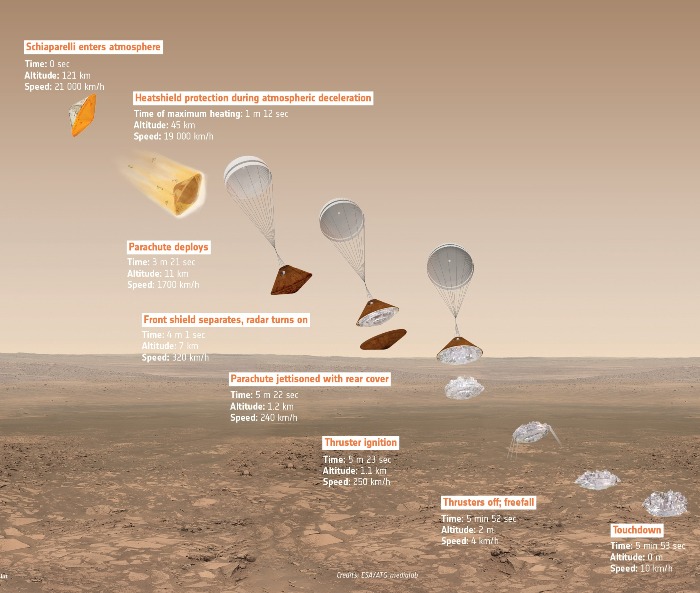
Посадочный аппарат EDM, он же Schiaparelli, «проснулся» по графику, в 13:27 UTC. Спустя 15 минут стало известно, что его сигнал принимает радиотелескоп Пуне. Индийцы охарактеризовали сигнал как «ясный и сильный». Летящий вокруг планеты Mars Express вел запись сигнала с 13:22 до 15:08, а тормозящийся у Марса TGO - с 14:20 по 14:56. В 14:42:18 экспериментальный посадочный аппарат EDM вошел в атмосферу Марса со скоростью 5.83 км/с. От этого момента до посадки должно было пройти 353 секунды (см. таблицу). Расчетный момент посадки был 19 октября в 14:48:11 UTC бортового времени.
С входом аппарата в плазму радиотелескоп в Пуне потерял сигнал, как и ожидалось, но через три минуты EDM вновь «подал голос» - он успешно прошел торможение в атмосфере! По «ступенькам» на графике частоты удалось «прочесть» ввод 12-метрового парашюта и сброслобового экрана. Наконец, скачком увеличился уровень сигнала - это означало, что парашют отстрелен и что передатчик EDM работает через основную антенну. После этого сигнал прекратился. Сначала это не очень обеспокоило болельщиков - «индийский» радиоканал был бонусом и имел право прерваться в любой момент. Операторы не могли не заподозрить проблему по временным отметкам событий, но в любом случае у них не было никаких вариантов, кроме как ждать ретрансляции сделанных записей. В 15:46 в Себреросе услышали Mars Express. Сразу выяснилось, что длина записи сигнала EDM соответствует ожиданиям. Спутник передал ее примерно за 10 минут, на интерпретацию специалисты затребовали по крайней мере полчаса, но лишь к 17:00 смогли сказать, что запись «не позволяет сделать уверенное заключение» о состоянии Schiaparelli. Тем временем в 15:18 пропал сигнал с TGO - потому что за 10 минут до этого орбитальный аппарат со все еще работающим двигателем скрылся за Марсом. Двигатель выключился в 15:24 по набору необходимой скорости, отработав 139 минут; в 15:32 по временной метке аппарат перекрыл клапаны магистралей топлива и начал разворачиваться и восстанавливать свое рабочее состояние для связи с Землей. Наконец TGO вышел из-за планеты: в 16:34 сигнал услышали в Маларгуэ и на 70-метровой антенне DSS-63 под Мадридом. Сам факт восстановления связи по графику говорил, что торможение завершилось штатно, и первые данные телеметрии это подтвердили. В 18:31 Мишель Дени официально объявил, что TGO вышел на орбиту вокруг Марса с параметрами в пределах допуска. Таким образом, долгоживущий спутник Марса, предназначенный для регистрации метана и других малых составляющих в атмосфере планеты и воды в грунте, а также для ретрансляции данных с ровера Pasteur, текущую задачу выполнил. Что же касается EDM, то с 16:49 до 17:03 над ним должен был пройти американский спутник MRO. Лэндер был запрограммирован «проснуться» и в ходе восьмиминутного сеанса передать через MRO данные о себе. Однако в 18:40, еще до того, как они были получены из Пасадены, руководитель полетных операций Паоло Ферри объявил, что ситуация с лэндером требует углубленного анализа и что новая информация будет дана на следующее утро в 08:00 UTC, когда будут считаны и проанализированы записи телеметрии на борту TGO. Анализируя неудачу
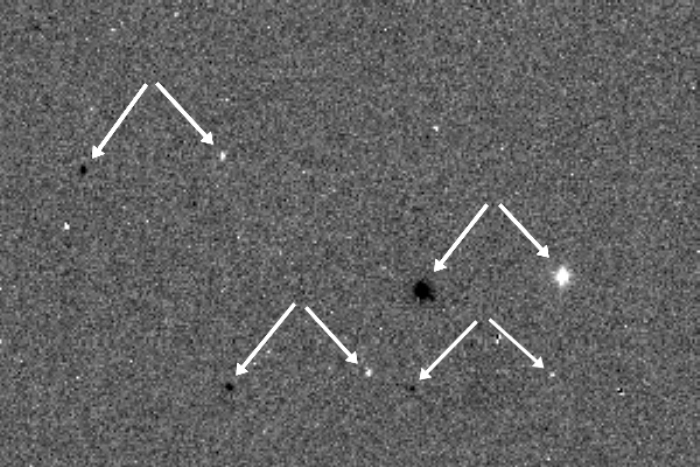
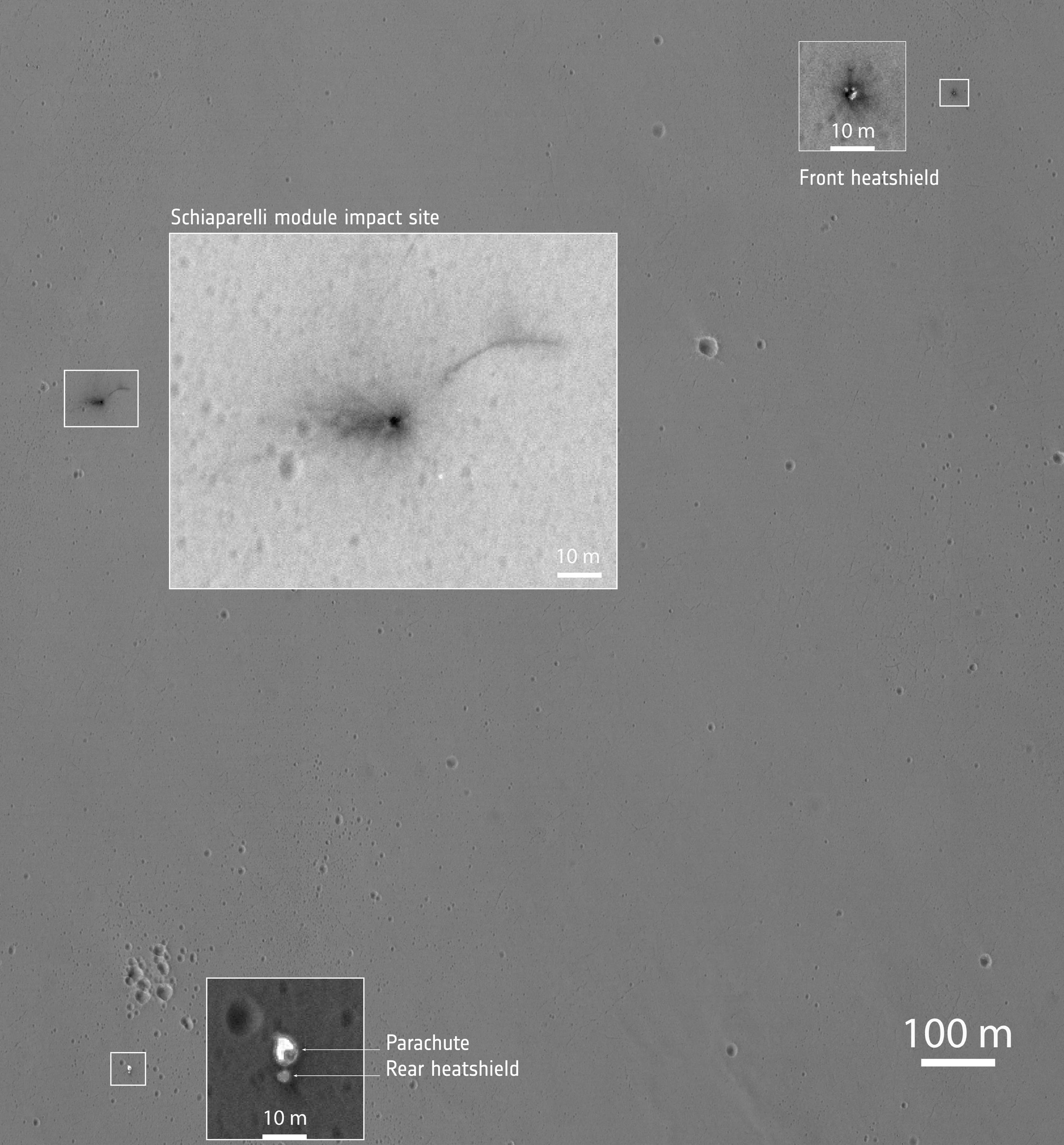
На брифинге утром 20 октября Андреа Аккомаццо, которого после окончания полета «Розетты» повысили в должности до руководителя планетных миссий ESOC, сообщил, что с орбитального аппарата TGO считано 600 Мбайт данных, включая 20 Мбайт телеметрии от лэндера, что никаких сигналов с EDM не было получено через MRO ни при первом, ни при двух следующих пролетах и что необходимо разобраться «в том, что произошло в последние несколько секунд перед посадкой». Он отметил, что теплозащита аппарата успешно выдержала торможение в марсианской атмосфере, что спуск под парашютом проходил «совершенно номинально», что посадочный радиолокатор работал и поставлял в систему управления информацию и что девять посадочных двигателей работали в течение нескольких секунд. В то же время, сказал он, передача с борта прекратилась приблизительно за 50 сек до ожидаемого времени касания, а допплеровский сдвиг радиосигнала, записанного на Mars Express, не соответствовал данным, которые передавал по телеметрии сам EDM. Аккомаццо подчеркнул, что до определенного момента все шло штатно и что с инженерной точки зрения получены те самые данные, ради которых экспериментальный аппарат и был построен и запущен. Вывод из сказанного очевиден: эксперимент выполнен успешно и принес ценную информацию, однако в ходе его «что-то пошло не так» и аппарат, скорее всего, погиб. 20 октября пресс-служба ЕКА уточнила, что все этапы спуска вплоть до начала парашютного спуска и сброса лобовой теплозащиты прошли по плану и что отклонения начались с момента отстрела хвостового обтекателя с парашютом. Отмечалось также, что этот отстрел произошел раньше расчетного времени и что посадочные двигатели, включившись, также проработали меньше, чем должны были, и выключились «на высоте, которую еще предстоит определить». «Мы получили данные, которые позволят нам полностью понять те этапы, которые были выполнены, равно как и то, почему мягкая посадка не произошла», - сказал глава директората пилотируемых полетов и роботизированных исследований ЕКА Дэвид Паркер. В тот же день научный корреспондент ВВС Джонатан Амос сообщил, что хвостовой обтекатель с парашютом был отстрелен преждевременно и что включившиеся после этого тормозные двигатели проработали вопреки всякой логике от 3 до 4 сек вместо 29 сек по плану. После их выключения сигнал EDM продолжался еще 19 секунд. В сумме с информацией, озвученной на брифинге, получалось, что отстрел парашюта прошел приблизительно на отметке 4:41 от входа, то есть ровно посередине между сбросом лобового экрана и началом работы радиолокатора (4:01) и расчетным моментом перехода к торможению на двигателях (5:21). Высота в этот момент получалась близкой к 4 км, скорость - порядка 70 м/с. Двигатели перестали работать в 4:44 на высоте примерно 3800 м, и с этого момента аппарат массой 300 кг просто падал в течение 19 секунд. Баллистические данные в первом приближении сошлись, но оставалось непонятно, что могло заставить бортовой компьютер EDM повести себя столь неестественно. 21 октября ЕКА сообщило о результатах съемки района посадки с орбиты, проведенной накануне контекстной камерой СТХ американского спутника MRO с разрешением б м. На снимке немного западнее центра посадочного эллипса читались два новых объекта по сравнению с предыдущей съемкой в мае 2016 г.: светлое пятно, которое могло быть 12-метровым парашютом, и темный участок неправильной формы размером примерно 15*40 м приблизительно в километре к северу от первого. Его признали следом падения самого EDM после преждевременного отключения двигателей с высоты от 2 до 4 км и со скоростью порядка 100 м/с. В сообщении допускалось, что при падении взорвалось топливо в трех его баках, поскольку из 46 кг гидразина была израсходована лишь малая часть. Итак, через двое суток после прилета стало ясно, что экспериментальный посадочный аппарат EDM Schiaparelli разбился в 5.4 км западнее расчетного места посадки, в точке с координатами 2.07° ю. ш., 6.21° з.д. При этом общая оценка исхода эксперимента не изменилась: как заявил 21 октября генеральный директор ЕКА Йоханн-Дитрих Вернер, тот факт, что Schiaparelli передал 80% ожидавшейся на спуске телеметрии, «делает его успешным вне зависимости от того, что произошло в последние секунды». Постановщики основного эксперимента AMELIA по исследованию и анализу входа в атмосферу и посадки сообщили, что получили необходимые данные и считают тест выполненным на 99%. А вот многонациональная команда метеокомплекса DREAMS была в трауре - их мечты разбились о твердую поверхность негостеприимного Марса. Из опубликованных данных не ясно, было ли проведено фотографирование поверхности десантной камерой DECA. Этот технический прибор должен был сделать 15 черно-белых снимков с интервалами 1.5 сек (первый с высоты около 3 км, последний - с 1.5 км) для привязки точки посадки и уточнения динамики спуска. В любом случае передача снимков планировалась через несколько минут после посадки, как и детальной информации о ходе спуска, - в реальном времени через TGO ретранслировался ограниченный набор данных. 25 октября был сделан камерой HiRISE на спутнике MRO и 27 октября опубликован снимок района посадки сверхвысокого разрешения. На нем удалось найти два отделенных в ходе спуска объекта - лобовой экран и хвостовой обтекатель с парашютом, а также темный кратер диаметром 2.4 м в месте падения EDM и «кляксу» следов взрыва баков с гидразином.
Техническое расследование причин и хода аварии завершилось к началу ноября, однако предварительное сообщение о его результатах ЕКА опубликовало лишь 23 ноября, когда этот материал готовился к печати. Агентство сообщило, что ввод парашюта EDM прошел штатно на высоте 12 км при скорости 480 м/с, а лобовой экран отделился на высоте 7.8 км, что в целом соответствовало расчетной циклограмме. В ходе дальнейшего спуска под парашютом радиолокационный допплеровский высотомер функционировал корректно, и его данные принимались навигационно-управляющей системой КА. Источником проблемы оказался другой датчик системы - инерциальный измерительный блок IMU, обеспечивающий независимые измерения трех компонентов ускорения и трех угловых скоростей. По этим данным бортовой компьютер производил счисление пути и скорости от априорно известной точки входа в атмосферу до ввода парашюта и далее. EDM имел в своем составе два дублирующих друг друга бесплатформернных IMU типа LN-200S производства американской фирмы Northrop Grumman. Это изделие имело богатую летную историю: оно было разработано для КА Clementine (1994) и успешно использовалось при посадке американских марсоходов по проектам MER и MSL, в ряде спутников и даже в реактивном устройстве аварийного спасения астронавта SAFER. В состав каждого LN-200S входили три твердотельных волоконно-оптических гироскопа и три твердотельных кремниевых микроэлектромеханических акселерометра со взаимно перпендикулярными осями. Как выяснилось в результате обработки записанной телеметрии и было подтверждено компьютерным моделированием, вскоре после ввода парашюта произошло насыщение IMU, и он выдавал максимальный возможный уровень измеряемой величины в течение примерно секунды - дольше, чем ожидалось. Из текста сообщения можно понять, что речь шла не об ускорении, а об угловых величинах. Эта ошибочная информация была тем не менее принята навигационной системой и включена в обработку. В некий момент времени основанное на ложных входных данных счисление показало отрицательную высоту EDM над поверхностью Марса. Компьютер отреагировал на эту информацию реализацией аварийного сценария: он преждевременно отстрелил парашют, включил посадочные двигатели на минимально предусмотренное время (3 сек), выдал в эфир сигнал «Я на поверхности» и включил научную аппаратуру по графику первого послепосадочного сеанса. В действительности аппарат находился в этот момент на высоте около 3.7 км - и после непродолжительного свободного падения разбился от удара о грунт. Описанная картина аварии вызывает множество вопросов к логике проектирования и работы бортового ПО. Помимо самого факта приема сбойного значения за достоверное, не ясно, почему оно предпочло «держаться» до последнего за результаты интегрирования данных IMU, хотя они явно противоречили физике процесса спуска, и игнорировать корректные данные радиовысотомера о текущей высоте и скорости, тем более что штатный отстрел парашюта и переход к торможению двигателями должны были запускаться по данным последнего. Не слишком понятен также эпизод с переходом вычисленной высоты в отрицательную область и с реакцией программы именно на это событие, а не на какое-либо из предыдущих ненормальных значений. Выяснилось также, что в силу ряда причин финансового и организационного характера ЕКА не провело планировавшийся летный эксперимент с вводом парашютной системы EDM в земной атмосфере. Не факт, впрочем, что при этом удалось бы выявить проблему с интерпретацией данных IMU. ТGО начинает работу
21 октября было объявлено, что в результате торможения у Марса TGO успешно вышел на орбиту с минимальным расстоянием от центра планеты в 3691 км и максимальным порядка 101000 км. В более привычных единицах, то есть за вычетом марсианского радиуса, высота в периарии составила 301 км, в апоарии - примерно 98 600 км при периоде обращения 4.2 земных суток. Орбита была близка к расчетной с высотами 298x95856 км и периодом ровно 4 марсианских суток (то есть 4.1 земных). На этой орбите TGO будет оставаться до конца 2016 г. В течение 20-28 ноября на двух витках будет проводиться калибровка научных приборов. Так, камера CaSSIS проведет пробные съемки участков звездного неба, а затем сфотографирует с разных дистанций поверхность Марса и Фобос. Запланированы необходимые проверки и калибровки спектрометра ACS, включая калибровку надирных каналов по Марсу с большого расстояния, а также наблюдения атмосферных свечений в полярных областях, которые будут невозможны с рабочей круговой орбиты. Главная же задача ACS и NOMAD - измерить концентрации малых составляющих атмосферы планеты. Геометрия орбиты пока не позволяет работать «на просвет», в режиме захода Солнца за Марс, и планируются лишь надирные и лимбовые измерения. На втором из названных витков запланированы наблюдения Фобоса. FREND был включен еще 31 октября и с тех пор проводит регистрацию космического излучения и измерение вблизи апоцентров орбиты сигнала вторичных частиц, источником которых является сам TGO в его рабочей конфигурации. Этот сигнал необходимо «вычесть» из данных о нейтронном потоке от Марса для их корректной интерпретации. Наведение прибора на Марс и получение данных об излучении планеты также планируются на 20-28 ноября.
В декабре или январе после выполнения траекторных измерений и определения параметров орбиты TGO будет переведен с околоэкваториальной на орбиту наклонением 74°, а затем снизит апоцентр до значения, соответствующего периоду обращения в одни марсианские сутки. Почти весь 2017 год будет посвящен аэродинамическому торможению TGO. В марте импульсами в апоцентре высота перицентра будет снижена до погружения в верхние слои атмосферы, где КА на каждом пролете будет терять часть скорости. Процесс придется прервать в период прохождения Марса за Солнцем в июле и августе, но аэродинамическое торможение должно закончиться в декабре 2017 г., когда апоцентр опустится примерно до 400 км; после этого перицентр также поднимут до 400 км. Штатная работа TGO на низкой круговой орбите спутника Марса наклонением 74° и высотой 400 км начнется в марте 2018 г. и продлится до декабря 2019 г. Одновременно аппарат начнет выполнять функции ретранслятора для посадочных зондов и марсоходов и будет осуществлять ее по крайней мере до декабря 2022 г. Автор: И. ЛИСОВ, | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||




|
|