| |||||||||||||

| Заходите к нам на форум: задавайте вопросы - получайте ответы! |
|
Исследование Солнечной Системы - Марс
| |||||
 Исследователи Исследователи |
|||||
Миссии до 2012 г. |
Страница:
Космос станции,
Mars Global Surveyor (Part #1, Part #2, Part #3, Part #4, Part #5),
Mars Odyssey (Part #1, Part #2, Part #3, Part #4, Part #5, Part #6, Part #7),
Разведчик MRO (Part #1.1, Part #1.2, Part #2, Part #3, Part #4, Part #5, Part #6, Part #7, Part #8),
Mars Express (Part #1, Part #2, Part #3, Part #4, Part #5, Part #6),
Миссия Phoenix (Part #1, Part #2, Part #3.1, Part #3.2, Part #3.3,
Part #3.4),
Фобос-Грунт (Part #1, Part #2, Part #3);
|
|
Марс - красная звезда
Mars Reconnaisance Orbiter Земля - Марс
10 марта 2006 г. американский космический аппарат Mars Reconnaissance Orbiter выполнил успешное торможение и перешел с пролетной траектории на орбиту вокруг Красной планеты.
Перелет
Как мы уже сообщали, станция MRO была запущена с мыса Канаверал 12 августа 2005 г. В течение первого месяца полета аппарат был настроен, проверен и признан исправным. 27 августа состоялась первая коррекция межпланетной траектории, обозначенная TCM-1, общей продолжительностью 44.5 сек. 30–31 августа операторы провели поочередное включение научных приборов и сняли с них «показания», а с двух камер (MARCI и CTX) были даже получены снимки «пустого» космоса. Но не все прошло гладко: тестирование двух основных приборов – камеры высокого разрешения HiRISE и спектрометра CRISM закончилось досрочно из-за ненормальных температур. На CRISM'е включение системы охлаждения вызвало защитную реакцию компьютера: он «почувствовал», что становится слишком холодно. Причину удалось установить, но полная проверка спектрометра была отложена до декабря.
Операторам также пришлось подкорректировать тепловой режим камеры HiRISE, и после этого проверку удалось завершить. 8 сентября был проведен первый опытный сеанс съемки с использованием главного научного прибора станции – камеры HiRISE – и двух вспомогательных инструментов, контекстной камеры CTX и навигационной камеры ONC. Все три были направлены сначала на Землю и Луну, от которых аппарат уже удалился на 10 млн км, а затем на звездное скопление омега Центавра. Аппарат отработал сеанс без замечаний, обеспечив наведение на объекты и их сканирование с правильной скоростью, обработку «картинок» и их передачу на Землю. Кстати, на передачу ушло около 24 часов, и за это время на Землю поступило 75 Гбит данных – новый рекорд скоростной связи на межпланетных расстояниях! А в последующие дни MRO продемонстрировал свою максимально возможную пропускную способность: 6 Мбит/с. С немалого уже расстояния серп Луны с Морем Кризисов был виден неплохо: на огромном кадре в 20000x6000 пикселов он имел примерно 340 пикселов в длину и 60 в ширину, что соответствовало разрешению 10 км. Между прочим, это раз в десять лучше, чем видит глаз человека, находящегося в 27 раз ближе к Луне! Анализ снимков показал, что ориентация, настройка и фокус камеры не нарушились в ходе запуска АМС. «Нам очень понравилась работа камеры, и мы очень ждем того, что она покажет нам на Марсе», – заметил руководитель научной группы по камере HiRISE д-р Альфред МакИвен из Университета Аризоны. Сеанс 8 сентября состоялся на следующий день после очень мощной солнечной вспышки – четвертой по интенсивности за последние 15 лет. Очевидно, MRO был хорошо подготовлен к подобным событиям – работа его не нарушилась. В последующие недели тестирование камеры HiRISE продолжалось. План полета предусматривал три серии наблюдений звезд: 4–5 октября – для проверки соосности навигационной и главной камеры, 5 ноября – для настройки фокуса HiRISE и 13–14 декабря – для проверки ее стойкости к вибрациям, которые может вызвать работа других инструментов. В последней серии было отснято рассеянное скопление каппа Южного Креста (NGC 4755, или «Шкатулка драгоценностей», как назвал его когда-то сэр Джон Гершель). Альфред МакИвен остался доволен работой HiRISE.
18 ноября MRO выполнил вторую коррекцию траектории: проработав 19.1 сек, его шесть двигателей малой тяги (по 5 фунтов, или 22 Н) увеличили скорость аппарата на 0.75 м/с. Третья планировалась на 2 февраля 2006 г., но, как сказал руководитель навигационной группы MRO Тун-хань Ю (Tung-han You), расчеты постоянно показывали настолько малое отклонение от расчетной точки прицеливания у Марса, что ее отменили. Прилет
Фаза подлета к Марсу началась 10 января. На этом этапе нужно было не промахнуться – выйти точно в заданное место на высоте 400 км над южной полярной областью Марса для торможения и перехода на орбиту. Дальность – расстояние от Земли до КА – навигаторы могли определить по времени прохождения радиосигнала «туда и обратно». Скорость – точнее, ее продольную составляющую, вдоль луча зрения, – по допплеровскому смещению частоты радиосигнала. Для контроля бокового смещения аппарата проводились его одновременные радионаблюдения с двух наземных пунктов. Этот алгоритм гарантировал от повторения трагедии станции MCO в 1999 г., когда в результате ошибки в «счислении пути» она прошла слишком близко от поверхности Марса и сгорела в его атмосфере. На будущих аппаратах его «поперечные» координаты планируется уточнять по оптическим наблюдениям, и на MRO был поставлен соответствующий эксперимент. Навигационная камера ONC массой 2.8 кг с объективом диаметром 60 мм должна была сделать за последний месяц пути около 500 снимков Фобоса и Деймоса на фоне звезд. По положению спутников Марса навигаторы обещали вычислить точку съемки с точностью до 1 км в поперечном направлении. Отвечал за ONC ее научный руководитель д-р Стив Синнотт (Steve Synnott). Все эти меры предосторожности оказались излишними – маневр 18 ноября дал совершенно идеальную траекторию до самой точки торможения! Двигаясь по ней, 18 февраля аппарат прошел отметку 5 млн км от Марса на скорости около 2800 м/с относительно планеты, 2 марта приблизился к нему на 2 млн км, а 6 марта – на 1 млн км. Коррекция TCM-4, запланированная на 28 февраля, не потребовалась. Забегая вперед, добавим: резервная коррекция TCM-5 за четыре часа до выхода на орбиту также не была проведена! За четыре месяца полета, с 18 ноября до 10 марта, станция MRO не отклонилась от точки прицеливания настолько, чтобы потребовалось подправить ее путь! В итоге аппарат сэкономил 27 кг топлива, достаточные для семи дополнительных месяцев работы на орбите вокруг Марса. Заключительный этап подлета начался во вторник 7 марта. Программа выхода на орбиту была заложена на борт и подтверждена станцией. Итак, MRO имеет массу 2170 кг – немного меньше, чем при запуске, так как 10 кг топлива ушло на две коррекции. Аппарат должен включить шесть 38-фунтовых (170 Н) двигателей на 26.8 мин и израсходовать 783 кг топлива. Это обеспечит снижение скорости подлета (около 5500 м/с) на 1000.36 м/с и выход на орбиту высотой 400 км в перицентре и 44000 км в апоцентре с периодом 35.4 часа. В случае серьезного сбоя в ходе торможения бортовой компьютер должен перезапуститься, сориентировать станцию и продолжить выдачу тормозного импульса. Включение проводится 10 марта в 21:12:33 UTC в зоне одновременной видимости станций дальней связи Голдстоун и Мадрид. Радиосигнал проходит 215 млн км от Марса до Земли за 718 секунд, так что они должны увидеть начало импульса в 21:24:31 UTC по перелому на графике частоты. Через 21 мин 38 сек после начала импульса аппарат заходит за Марс и в течение почти 30 минут – до 22:16:01 – не виден и не слышен. Для выхода на орбиту, хотя бы и нерасчетно высокую, достаточно 23–24 мин работы двигателей. В 20:24 UTC (здесь и далее – время прихода сигнала) MRO начал подогрев двигателей с +1.7 до +60°C. В 20:50 был проведен наддув топливного бака – подъем давления с 13.4 до 16.5 кг/см2. С 21:07 до 21:19 аппарат развернулся на 120° и построил ориентацию для торможения. Телеметрия на Землю теперь шла на скорости 160 бит/с через ненаправленную антенну LGA. Точно по плану прошло включение шести 5-фунтовых двигателей – на 30 секунд для осаждения топлива. Затем в работу вступили главные, 38-фунтовые. В 21:46:23, почти в расчетное время, MRO ушел за край планеты, успев снизить свою скорость на 694 м/с – недоработка примерно в 1% от ожидаемого. А в 22:16 зал управления в Пасадене взорвался аплодисментами: сигнал возобновился с опозданием всего на семь секунд! Еще через девять минут руководители полета подтвердили, что аппарат на орбите. Компенсируя недостаток тяги, двигатели проработали 1641 секунду вместо 1608, и заданное приращение скорости было выдержано практически точно: 1000.48 м/с. Аппарат был выведен на орбиту с параметрами: > минимальная высота – 426 км; > максимальная высота – 43400 км; > период обращения – 35 час 34 мин. Орбита
Вскоре MRO переключился на остронаправленную антенну HGA и скорость передачи 550 кбит/с. Анализ показал: ДУ в штатном состоянии, аккумуляторы после захода в тень Марса разряжены лишь на 10%, ориентация устойчивая, прочие системы в норме. Дорога длиной 500 млн км закончилась…
По первоначальному плану полета уже 15 марта MRO должен был начать этап аэродинамического торможения – как до этого станции Mars Global Surveyor и Mars Odyssey.
По расчетам, 550 витков с погружением в перицентре в атмосферу Марса обеспечивали перевод КА с высокоэллиптической орбиты на почти круговую с минимальными затратами топлива. Однако в середине февраля было решено отсрочить это торможение и протестировать хотя бы в минимальном объеме научную аппаратуру.
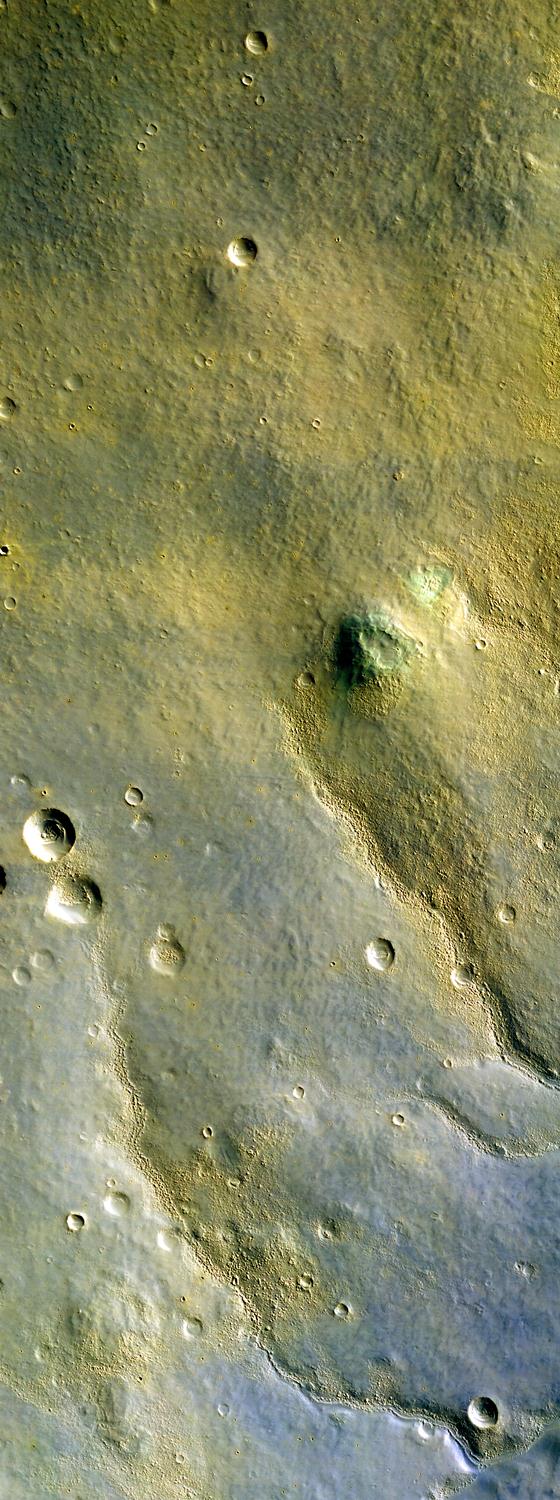
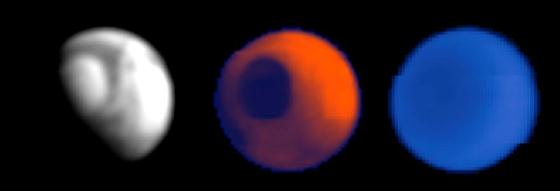
24 марта в 04:36 UTC по бортовому времени, в конце 10-го витка вокруг Марса, начался первый пробный 40-минутный сеанс съемки камерами HiRISE, CTX и MARCI (цветная камера). HiRISE, в частности, сделала четыре снимка между 04:41 и 04:50 с высоты от 2500 до 1300 км; съемка велась в полосе, идущей на юг от Долин Маринера и к западу от Аргира. Основной ее целью была проверка всего тракта приема и обработки снимков, а также получение исходного материала для разработки и проверки процедур калибровки и обработки изображений, точных коррекций, необходимых для цветной съемки и для высокоточных измерений поверхности с использованием стереоскопических пар снимков. Через станцию Канберра в Австралии 25 Гбит данных было передано хозяевам камер – в Лунно-планетную лабораторию Университета Аризоны и в компанию Malin Space Science Systems – и уже в 08:30 первый снимок попал в руки специалистов. В тот же день 24 марта, но уже из апогея орбиты Марс наблюдал метеозонд MCS – он сделал четыре скана с использованием девяти детекторов. Диск планеты имел размер всего 40 пикселов, но и этого было достаточно для того, чтобы увидеть северную полярную шапку и пылевые бури регионального масштаба. Впрочем, весной (а в северном полушарии Марса сейчас весна) пылевые бури маловероятны, и на снимках их не нашли. За пылевыми бурями на этапе аэродинамического торможения нужно внимательно наблюдать, так как они могут приводить к значительному увеличению плотности верхней атмосферы и к повреждению тормозящегося в ней КА. Теперь ясно: метеозонд MCS можно использовать для мониторинга температуры атмосферы и пылевых бурь в период торможения.
25 марта в период с 16:15 до 16:22 UTC камера HiRISE сделала второй комплект тестовых снимков на тех же широтах, что и накануне, но на противоположной стороне планеты. На этот раз другие приборы КА работали параллельно с HiRISE – еще раз проверялась ее работа в условиях вибраций. Данные об отснятых районах приведены в таблице.
30 марта MRO начал переход в режим аэродинамического торможения. В апоцентре орбиты он включил двигатели на 58 сек и в результате 31 марта в 14:46 UTC прошел в 15-й раз перицентр на высоте уже лишь 333 км. В ближайшие дни станция последовательными шагами снизит перицентр примерно до 100 км, где тормозящее действие атмосферы уже очень заметно. При прохождении атмосферы КА «подставляет» потоку площадь в 37.5 м2 – корпус, задние стороны солнечных батарей и антенны HGA. Тяжелый корпус находится впереди, а панели и антенна – сзади, что обеспечивает естественную стабилизацию наподобие воланчика. Научные инструменты в это время работать не будут. Торможение закончится в сентябре–октябре 2006 г. После этого тремя-четырьмя коррекциями MRO переведут на солнечно-синхронную орбиту высотой 255x320 км, где будет отстрелена крышка спектрометра CRISM и развернута антенна радиолокатора SHARAD.
С 7 октября по 8 ноября Марс будет находиться в соединении с Солнцем, а затем спутник начнет исследования и будет вести их по крайней мере до декабря 2008 г. В число первых целей камеры HiRISE входят потенциальные места посадки аппарата Phoenix, который должен достичь поверхности Марса в мае 2008 г., а также районы работы мобильной лаборатории MSL. Автор: П. ПАВЕЛЬЦЕВ, | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||








|
|