| |||||||||||||

| Заходите к нам на форум: задавайте вопросы - получайте ответы! |
|
Исследование Солнечной Системы - Земля и Луна
| |||||
Одиссея №2 |
|
Луна - наш космический спутник Взгдяд на космос Запуск LRO и LCROSS
18 июня 2009 г. в 17:32:00 EDT (21:32:00 UTC) со стартового комплекса SLC-41 Станции ВВС США «Мыс Канаверал» стартовый расчет компании United Launch Alliance осуществил успешный пуск ракеты Atlas V №AV020, и через 44 мин 43 сек после старта на траекторию полета к Луне были выведены американский лунный орбитальный разведчик LRO и связка из КА LCROSS и верхней ступени Centaur. Для запуска был использован Atlas V в наиболее легкой конфигурации 401. Расчетная циклограмма пуска приведена в таблице.
В каталоге Стратегического командования США аппарату LRO был присвоен номер 35315 и международное обозначение 2009-031А. LCROSS и Centaur сразу же получили отдельные обозначения 35316 и 35317, 2009-031В и 2009-031С, хотя их разделение не планировалось до 9 октября 2009 г. История и задачи проекта
Проект LRO родился одновременно с объявлением лунной инициативы Джорджа Буша (сына) в январе 2004 г. Менее чем через месяц в Конгресс был направлен проект бюджета, в котором в составе программы исследования и освоения Луны предусматривался запуск двух беспилотных разведывательных аппаратов - орбитального в 2008 г. и посадочного в 2009 г. - и были запрошены «с места в карьер» 70 млн $ на их реализацию. Первый проект вскоре получил название LRO (Lunar Reconnaissance Orbiter - лунный орбитальный разведчик). Он и сейчас финансируется из средств перспективной пилотируемой программы, и руководит им Исследовательский директорат, а не Директорат научных миссий. Четыре основные научные задачи LRO были сформулированы 4 марта 2004 г. специальной Группой определения требований и 24 мая одобрены руководителями четырех основных директоратов NASA. Эти задачи были сформулированы следующим образом: 1) Определение характеристик радиационной обстановки в окололунном пространстве и потенциальной возможности уменьшения ее влияния на биологические объекты. 2) Создание трехмерной глобальной геодезической сети Луны и проведение необходимых топографических изысканий для выбора мест потенциальной посадки. 3) Детальное изучение ресурсов и окружающей среды полярных районов Луны. 4) Определение состава, минералогии и характеристик реголита по поверхности Луны с высоким разрешением. Ну, а если изъясняться более понятным языком, то основными целями миссии являются глобальное картографирование Луны, поиск наиболее безопасных мест посадки для пилотируемых экспедиций, разведка радиационной обстановки и определение мест залегания потенциальных ресурсов, и прежде всего водного льда. И в качестве бонуса - исследования, призванные лучше понять лунную топографию и минералогию.
Конгресс США остался недоволен тем, как сформулировано задание, и в декабре 2004 г. урезал финансирование программы исследования Луны автоматами RLEP с 70 до 10 млн $ и потребовал, чтобы станция LRO не была лишь средством разведки Луны в интересах пилотируемой инициативы Буша, но чтобы по крайней мере 25% ее научной аппаратуры было нацелено на решение фундаментальных научных задач. Интерес к Луне со стороны ученых подогревался яркими успехами предыдущего лунного аппарата NASA - Lunar Prospector, стартовавшего в 1998 г. и в ходе своего полутора-годового полета сумевшего обнаружить по характеристикам нейтронного излучения признаки водного льда в постоянно затененных полярных кратерах Луны. Эти результаты пока не подтверждены и нуждаются в проверке, но, безусловно, лед на Луне был бы исключительно важен для организации работы лунной базы и транспортной системы. Тем временем 22 декабря 2004 г. NASA объявило результаты конкурсного отбора научной аппаратуры для LRO и сформировало приборный комплекс из пяти американских и одного российского прибора. В мае 2005 г. «на борт» приняли дополнительно американский экспериментальный радиолокатор Mini-RF. Определилась и ориентировочная дата запуска - 28 октября 2008 г. В итоге согласие между учеными и постановщиками технических задач LRO было достигнуто. Конгресс удалось убедить в высокой научной ценности проекта, и финансирование было открыто в феврале 2005 г. Кстати, общая стоимость проекта на момент запуска оценивается в 504 млн $.
Первоначально LRO планировали запустить на РН Delta II в тяжелом варианте 7925Н-9.5, последней в серии, однако расчеты показали, что ее верхняя ступень с таким грузом не будет стабильна. Поэтому в конце 2005 г. был выбран более тяжелый носитель Atlas V. Это, в свою очередь, позволяло разместить дополнительный полезный груз LCROSS с задачей ударного зондирования Луны, и 10 апреля 2006 г. этот попутный проект был выбран для реализации. В мае 2006 г. после успешной предварительной защиты проект LRO был утвержден окончательно. За него отвечает Центр космических полетов имени Годдарда (GSFC), который осуществил разработку КА, отработку комплекса научной аппаратуры, испытания аппарата перед стартом, а в настоящий момент руководит полетом LRO. Менеджером проекта от GSFC является Крейг Тули (Craig R. Tooley), а научным руководителем - Ричард Вондрак (Richard R. Vondrak). «С началом работы миссии LRO начинается новый путь NASA на Луну!» - такими заголовками в июне 2009 г. пестрили не только материалы информационных источников, но и официальные сообщения космических агентств. И действительно, хотя LRO и не является первым аппаратом, отправленным США к Луне в «постаполлоновскую» эпоху, он стал первым реальным плодом предложенной Бушем стратегии освоения космического пространства и небесных тел. Неслучайно уже сейчас миссию LRO сравнивают с тремя программами 1960-х годов - Ranger, Lunar Orbiter и Surveyor. Ведь подобно тому, как они проложили дорогу «Аполлонам» и обеспечили первый шаг Нейла Армстронга, LRO призван выполнить ту же роль для новой пилотируемой программы. И не исключено, что новый Армстронг в числе многих тысяч людей по всему миру наблюдал 18 июня за трансляцией старта, которую вело телевидение NASA в сети Интернет. Для привлечения внимания общественности была выдвинута инициатива «Пошли свое имя к Луне»: на этот призыв откликнулись свыше 1.6 млн человек, имена которых были записаны на специальный микрочип, установленный на борту КА. Конструкция LRO
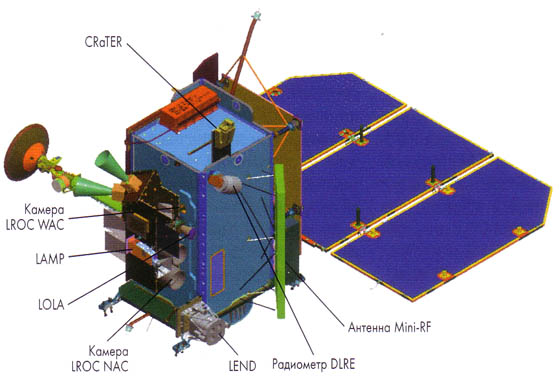
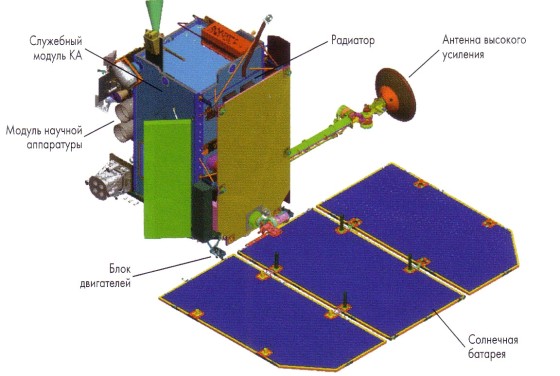
Стартовая масса LRO составляет 1916 кг, включая 1018 кг сухой массы и 898 кг топлива. Запас гидразина в двух баках обеспечивает суммарное приращение скорости КА до 1270 м/с. Длина LRO в стартовом положении -3.86 м, поперечные размеры - 2.62 м от приборного комплекса на стороне +Y до сложенной солнечной батареи и 2.74 м от сложенной остронаправленной антенны HGA до антенны радиолокатора Mini-RF. Источником электропитания КА является ориентируемая трехсекционная солнечная батарея размером 4.27x3.20 м с приводом на оси -Y. Эффективная площадь батареи составляет 10.7 кв. м, максимальная мощность к концу срока службы - 1850 Вт, средневитковая мощность - 800 Вт, энергопотребление LRO в среднем за виток - 685 Вт. На теневых участках орбиты электропитание обеспечивается литий-ионной аккумуляторной батареей емкостью 80 А-час.
Штатная ориентация LRO - трехосная лунная орбитальная, осью +Z в надир с погрешностью не более 60". Определение текущей ориентации осуществляется с помощью двух звездных датчиков и одного инерциального измерительного блока с точностью до 30". В защитном режиме ориентация по отношению к Солнцу определяется курсовым солнечным датчиком. Исполнительными органами системы ориентации являются четыре гиродина, разгрузка которых осуществляется с помощью микродвигателей один раз в месяц. LRO имеет две пары ЖРД маневрирования тягой по 20 фунтов (9.1 кгс) и два блока по четыре двигателя тягой по 5 фунтов (2.3 кгс). Аппарат оснащен приемопередающей системой S-диапазона для командного управления и сброса телеметрической информации и основной высокоскоростной системой передачи научной информации, работающей в диапазоне Ка. Передача ведется через остронаправленную антенну HGA. Пропусная способность радиоканала Ка-диапазона - 100 Мбит/с, суточный объем передаваемой информации - 461 Гбит. Главная наземная станция для работы с LRO находится на полигоне Уайт-Сэндз. Научная аппаратура
 Камера LROC (Lunar Reconnaissance Orbiter Camera), разработанная в Университете штата Аризона, предназначена для получения черно-белых изображений
сверхвысокого разрешения. LROC состоит из двух отдельных камер, узкоугольной NAC и широкоугольной WAC, и общего блока управления и сжатия данных.
Компоненты LROC являются вариантами камер MARCI и СТХ на спутнике Марса MRO. Камера LROC (Lunar Reconnaissance Orbiter Camera), разработанная в Университете штата Аризона, предназначена для получения черно-белых изображений
сверхвысокого разрешения. LROC состоит из двух отдельных камер, узкоугольной NAC и широкоугольной WAC, и общего блока управления и сжатия данных.
Компоненты LROC являются вариантами камер MARCI и СТХ на спутнике Марса MRO.
Панхроматическая камера NAC имеет разрешение 0.5 м в полосе шириной 5 км. NAC использует телеобъектив по схеме Ричи-Кретьена с фокусной длиной 700 мм при относительном отверстии 1:3.59 и поле зрения 2.86°. Приемником является линейка Kodak KLI-5001G на 5000 элементов. WAC может вести съемку в семи диапазонах видимого и ультрафиолетового света (315, 360, 415, 560, 600, 640 и 680 нм) в полосе 60 км с разрешением 100 м. Камера имеет два объектива с фокусной длиной 6 мм, полем зрения 90° и относительным отверстием 1:5.1 для видимого диапазона и 1:8.7 для ультрафиолетового. Приемник - матрица Kodak KAI-1001 размером 1024x1024 пиксела. Две основные задачи LROC - картирование Луны с метровым разрешением для выбора потенциальных мест посадки и разведка околополярных районов с поиском постоянно затененных и постоянно освещенных мест. В списке - 25 мест наивысшего приоритета и примерно 1800 и 4400 - второго и третьего. Запланированы детальная съемка полярных районов, трехмерные съемки с субметровым разрешением, а также глобальная мультиспектральная съемка Луны со 100-метровым разрешением.
Как это ни парадоксально, США не имеют карты Луны с подробным и равномерным покрытием. Спутники Lunar Orbiter и корабли Apollo подробно отсняли только ту ее зону, где планировались и производились лунные экспедиции, а последующие исследования с КА Clementine и Lunar Prospector не были полны. Как следствие, более половины перспективных точек посадки на Луну не имеют картографического обеспечения. Наконец, запланированы съемки районов, исследованных в период программы Apollo, но не для развлечения, а для подсчета количества свежих кратеров и оценки опасности метеоритной бомбардировки. Радиометр DLRE (Diviner Lunar Radiometer Experiment), разработанный совместно Калифорнийским университетом и Лабораторией реактивного движения,
предназначен для измерения поверхностных и подповерхностных температур Луны в глобальном масштабе с целью идентификации холодных зон, где может сохраняться
лед. В задачи эксперимента входит также выявление возможных опасностей (крупные камни и неровности поверхности), а также исследование тепловых свойств
грунта и минералогии силикатов.
Diviner («прорицатель») является почти точной копией прибора MCS на LRO. Прибор имеет в своем составе оптическую систему и блок двухстепенного наведения
для сканирования лунной поверхности. Он будет вести измерения в девяти диапазонах длин волн между 7 и 200 мкм; результаты будут представлены в виде карт с
разрешением 300 м по поверхности и 5°С по температуре.
Нейтронный детектор LEND (Lunar Exploration Neutron Detector) предназначен для создания карты распределения водорода в верхнем (до 1 м) слое лунного
реголита с разрешением до 10 км, а также для сбора информации о нейтронной компоненте окололунной радиации в диапазоне до 15 МэВ. Детектор разработан в
Институте космических исследований РАН под руководством Игоря Георгиевича Митрофанова в соответствии с соглашением между Роскосмосом и NASA.
Принцип действия LEND состоит в регистрации потока быстрых и промежуточных (с энергией 0.4-100 эВ) нейтронов. Бомбардировка Луны космическими лучами порождает в грунте быстрые нейтроны, которые замедляются при столкновении с атомами водорода. Избыток промежуточных нейтронов над определенным районом Луны говорит о высокой концентрации водорода в грунте и, как следствие, о наличии водного льда вблизи поверхности. LEND представляет собой нейтронный и гамма-спектрометр, имеющий 10 независимых детекторов. Основные детекторные и электронные узлы основаны на опыте разработки прибора HEND, который успешно работает на борту КА Mars Odyssey с октября 2001 г. Принципиальным отличием LEND является блок коллимирования нейтронов, который улучшает чувствительность при наблюдениях отдельного участка поверхности, «отсекая» нейтроны, пришедшие от других участков, и обеспечивает улучшение разрешения на поверхности Луны со 140 до 10 км. А это уже меньше, чем ожидаемые размеры «холодных ловушек», содержащих лед! С помощью установки LAMP (Lyman-Alpha Mapping Project) предполагается осуществить картографическую съемку лунной поверхности с разрешением в несколько
километров в коротковолновом отраженном ультрафиолетовом излучении (120-180 нм). При этом используется уникальная технология, физический смысл которой
состоит в том, что прибор наблюдает поверхность, освещенную не Солнцем, а... звездами и свечением межпланетного водорода в линии Лайман-альфа!
С помощью LAMP будет проводиться поиск и картирование поверхностного льда и инея в полярных районах. Кроме того, в задачи прибора входит изучение минералогии Луны и состава ее разреженной атмосферы. Разработчиком и изготовителем является Юго-Западный исследовательский институт в Сан-Антонио; прототип LAMP называется ALICE и находится в пути к Плутону на борту АМС New Horizons, а первым руководителем проекта LAMP был Алан Стерн. Лазерный высотомер LOLA (Lunar Orbiter Laser Altimeter) предназначен для составления трехмерной карты поверхности Луны с высоким разрешением. Именно по ней
будут выбираться районы безопасной посадки и маршруты движения. Кроме того, карта LOLA с разрешением 50 м по координатам и 0.5-1.0 м по высоте позволят
надежно выявить постоянно затененные и постоянно освещенные участки поверхности.
LOLA является вариантом высотомера MOLA на КА MGS. Прибор использует инфракрасный лазер с длиной волны 1064 нм и частотой следования импульсов 28 Гц, причем его импульс делится на пять отдельных пятен в направлениях вдоль и поперек трассы полета. Помимо текущей высоты полета, по деталям отраженного сигнала определяется отражающая способность лунной поверхности, степень неровности, величина и направление уклона. За год работы должно быть получено 4 млрд измерений дальности с шагом 60 м. Технологически связан с LOLA лазерный телескоп-приемник для точного определения расстояния от Земли до КА, размещенный соосно с остронаправленой антенной и соединенный с LOLA оптико-волоконным кабелем. Лазерное слежение за MRO будет осуществлять система NGSLR в Геофизической и астрономической обсерватории Центра Годдарда. Технологический демонстратор Mini-RF (Miniature Radio Frequency Technology Demonstration) представляет собой радар с синтезированием апертуры, работающий в
Х- и S-диапазонах и предназначенный для получения изображений постоянно затененных районов с разрешением 30-150 м и для определения наличия в них залежей
водного льда. Антенна радиолокатора закреплена на КА под углом 50°; развертку изображения обеспечивает движение спутника.
Прибор разработан Лабораторией прикладной физики Университета Джонса Хоп-кинса. Данные его прототипа Mini-SAR на индийской АМС Chandrayaan-1 будут использованы для планирования работы Mini-RF. Возможны также бистатические наблюдения, когда излучает сигнал один из КА, а принимает другой. Телескоп космических лучей CRaTER (Cosmic Ray Telescope for the Effects of Radiation) разработан и изготовлен Бостонским университетом и Массачусеттским
технологическим институтом и предназначен для определения характеристик заряженных частиц солнечного и галактического происхождения, в особенности в
диапазоне энергий вблизи 10 МэВ. Полученные данные будут использоваться для определения потенциальной радиационной опасности для астронавтов.
Принцип действия прибора основан на регистрации энергии космических лучей, поглощаемых тканеэквивалентными материалами различной толщины. CRaTER имеет в своем составе три пары кремниевых детекторов («толстый» и «тонкий»), между которыми находятся два слоя тканеэквивалентного пластика А-150. Каждый из детекторов выдает сигнал, пропорциональный поглощенной в нем энергии частицы. В сумме они позволяют определить величину линейной передачи энергии, то есть энергии, поглощаемой средой на единицу длины пробега частицы, в диапазоне от 0.1 до 2.2 МэВ/мкм. Тем самым будут проверены модели радиационного воздействия и защиты. Аппарат LCROSS
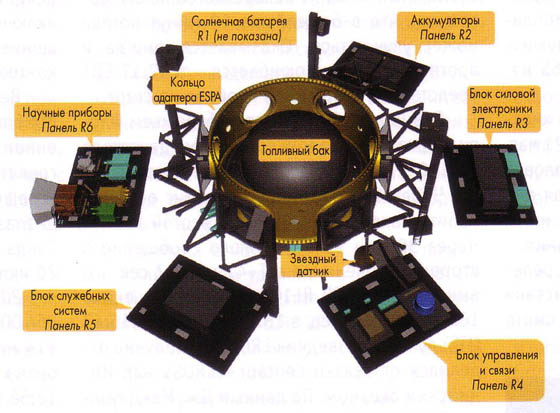
Если LRO для осуществления своей программы использует методы дистанционного зондирования, то перед LCROSS стоит более интересная задача. Он должен непосредственно определить, есть ли на Луне вода или нет. И объектом его исследования должен стать материал, выброшенный в результате падения на поверхность Луны ступени Centaur. Большую часть полета LCROSS будет выполнять функции «чабана», то есть обеспечивать доставку ступени Centaur массой свыше 2000 кг в заданный район Луны. И лишь перед самым столкновением он должен будет пронаблюдать его ход и результаты и передать информацию на Землю. После этого LCROSS также врежется в Луну и погибнет. Аппарат LCROSS разработан и создан компанией Northrop Grumman в лице ее отделений Aerospace Systems в г. Редондо-Бич (Калифорния) и Technical Services в г. Лэтам (Мэриленд). Научная аппаратура разработана в Исследовательском центре имени Эймса NASA, который также руководит проектом и управляет полетом КА. Возглавляет проект Дэниел Эндрюс (Daniel R. Andrews), научным руководителем является Энтони Колапрете (Anthony Colaprete). При создании LCROSS был применен весьма оригинальный инженерный подход. Как известно, для использования совместно с РН Atlas V и Delta IV Medium компания CSA Engineering разработала специальный кольцевой адаптер полезных нагрузок ESPA (EELV Secondary Payload Adapter) диаметром 1.59 м и высотой 0.61 м с шестью боковыми посадочными местати для малых КА, который устанавливается между верхней ступенью и основной полезной нагрузкой. Впервые он был использован в пуске 7 марта 2007 г.
В данном случае ESPA послужил основой для самостоятельного КА. Внутри него был смонтирован шарообразный топливный бак и монокомпонентная двигательная установка, а на боковых поверхностях вместо шести спутников установили шесть панелей размером примерно 0.9x0.6x0.45 м, которые несут солнечную батарею (панель R1), аккумуляторы (R2), блоки служебных систем (R3-R5) и научную аппаратуру (R6). Аппарат LCROSS имеет 2.01 м в высоту; его поперечный размер достигает 2.62 м, а по всенаправленным антеннам -Z и +Z - 3.33 м. Стартовая масса КА составляет 896 кг, из которых 586 кг приходится на конструкцию, 305.5 кг - на топливо бортовой двигательной установки (гидразин) и 4.8 кг - на азот системы наддува. Для обеспечения энергоснабжения бортовой аппаратуры LCROSS оснащен фиксированной солнечной батареей пиковой мощностью 420 Вт и литий-ионной аккумуляторной батареей на 40 А-час. Поддержание солнечной ориентации осуществляется с помощью одного звездного и 10 грубых солнечных датчиков. Аппарат имеет два ЖРД тягой по 5 фунтов (2.27 кгс) для направленного перемещения и восемь ЖРД тягой по 1 фунту (0.45 кгс) для ориентации и стабилизации. Для приема команд, передачи телеметрии и научной информации КА оснащен транспондером S-диапазона мощностью 7 Вт, двумя малонаправленными антеннами MGA, обеспечивающими передачу с номинальной скоростью 1.5 Мбит/сек и двумя всенаправленными антеннами LGA (40 кбит/с). Данные передаются в режиме реального времени. Научная аппаратура LCROSS включает в свой состав следующие устройства: Контекстная цветная камера видимого диапазона фирмы Ecliptic Enterprises для изучения формы облака выброшенного
материала и определения свойств фрагментов.
Две камеры ближнего инфракрасного диапазона (0.9-1.7 мкм) производства Goodrich Sensors Unlimited, которые
помимо вышесказанного будут измерять концентрацию водяных паров в линии 1.4 мкм.
Две камеры среднего ИК-диапазона от Thermoteknix и Indigo для наблюдений в диапазоне 6-13.5 мкм. С их помощью
будет также проводиться измерение тепловой эволюции выброшенного грунта и фотографирование образовавшегося кратера.
Спектрометр видимого и ближнего УФ-диапазона (263-650 нм) фирмы Ocean Optics для спектрометрии выброса,
определения свойств частиц грунта и поиска продуктов диссоциации воды - ионов ОН- и Н20+.
Два спектрометра ближнего инфракрасного диапазона (1.2-2.4 мкм) компании Poly-chromix для спектрометрии и
определения свойств частиц, поиска признаков водного льда и поглощения водяного пара грунтом.
Высокоскоростной фотометр Центра Эймса для измерения с частотой 1000 Гц яркости вспышки в диапазоне 400-1000 нм
и скорости ее затухания.
Общий блок обработки информации осуществляетуправление инструментами и прием полученных данных. Бюджету NASA проект LCROSS обошелся в 79 млн $ без учета стоимости отсрочки старта с октября 2008 г. Полезная нагрузка «Атласа» построена следующим образом. На «Центавре» установлены адаптеры С22 и D1666, к последнему через систему отделения CBOD крепится адаптер ESPA спутника LCROSS. На вершине его стоит еще один С22 в сочетании с В1194 и далее на своей системе отделения - LRO. Подготовка к запуску LRO
Срок запуска LRO изначально был очень «мобилизующим», а задержки с началом финансирования и «пересадка» на другую ракету не могли не вызвать сдвига «вправо». В июле 2008 г. запуск отложили на февраль 2009 г. К этому моменту КА был собран и направлен на испытания, и воскресенье 31 августа стало первым днем за много месяцев, когда команда LRO позволила себе не работать. Откуда это известно? Об этом сообщил лично менеджер проекта Крейг Тули на специальном блоге проекта http://lroupdate. blogspot.com/. И далее на протяжении девяти месяцев почти ежедневно, а иногда и по много раз в день участники проекта отчитывались там, в каком состоянии аппарат и какие конкретно испытания он проходит. Такая открытость почти неизвестна еще у нас в России, но именно она рождает доверие к проекту и уверенность в его успехе. 15 октября LRO был передан на термовакуумные испытания. Они начались 26 октября и продолжались до 23 декабря; за это время многократно проверялась работа всех систем и научных приборов, а закончился цикл испытаний контрольным прогоном основных событий полета. За этим последовали новые тесты, суммарная продолжительность которых составила 2500 часов. Наконец весь цикл испытаний был завершен, и 10 февраля спутник был признан годным к отправке на полигон. На следующий день в транспортном контейнере он был помещен на специальный грузовик и отбыл из Гринбелта. Интересно, что территорию GSFC грузовик покинул еще до рассвета с целью избежать постоянных разгонов и торможений в пробках, которые могли не пойти на пользу деликатному грузу. Вечером 12 февраля LRO прибыл во Флориду и на следующее утро был помещен в МИК компании Astrotech для предстартовых испытаний - тесты, контрольные прогоны полетной программы, проверка работы двигателей... Старт в этот момент планировался на 24 апреля, однако его дата зависела от хода подготовки к запуску военного связного спутника WGS SV-2 носителем Atlas V. Заметим, что по условиям выхода на орбиту вокруг Луны с определенными параметрами LRO имел стартовые «окна» протяженностью 2-3 суток раз в две недели, так что отложить его пришлось бы сразу на 7 мая. Добавим также, что от даты запуска зависела геометрия полета LCROSS и даже выбор того полушария, куда он должен был попасть. При запуске в октябре 2008 г. и падении в начале 2009 г. выбирать нужно было южную полярную область, так как именно она из-за либрации была бы обращена к земным наблюдателям. С переносом пуска на весну 2009 г. целиться нужно было уже в северную полярную область. 17 февраля и LCROSS покинул предприятие Northrop Grumman и направился через всю страну во Флориду. Еще через три дня на полигон был доставлен Centaur (его привез Ан-124-100 компании «Волга-Днепр»), а 26 февраля появился обтекатель. Наконец, 3 марта на «Ане» в Центр Кеннеди была доставлена первая ступень РН Атлас V. Можно было бы собирать все вместе, но... 27 февраля NASA объявило о переносе старта на 21 мая. Дело в том, что к этому моменту старт «Дискавери» (STS-119) сместился на 12 марта и оказался недопустимо близок к пуску Atlas V со спутником WGS SV-2, намеченному на 14 марта. В результате запуск «связника» пришлось перенести на 17 марта, и следующий «Атлас» не успевал уже и к 7 мая. А 17 марта WGS SV-2 подложил очередную «свинью»: при заправке носителя перед стартом потек клапан, и ракету пришлось увезти в здание вертикальной сборки VIF для ремонта. Лишь 2 апреля она вернулась на старт и 3 апреля благополучно улетела. «Наконец-то они убрались с нашего пути!» Успеть к стартовому окну 21-23 мая было еще можно, но подготовка к запуску LRO должна была пройти «без сучка, без задоринки» - никаких запасных дней просто не оставалось. Поэтому LRO отложили до 2 июня. 28 апреля Atlas №AV020 был наконец установлен в здании вертикальной сборки VIF, а через два дня на него была смонтирована ступень Centaur. Тем временем 19 апреля к LRO были пристыкованы солнечные батареи, а 22 апреля проверена реакция системы ориентации на внешние воздействия. 29 апреля состоялась опрессовка топливных баков КА, затем были проверены клапаны и регуляторы, и 5 мая в баки было залито 898 кг гидразина. 11 мая «встретились два лунатика» - состоялась установка LCROSS на LRO. 15 мая связка была закрыта обтекателем. И в этот же день пуск был снова перенесен на две недели - на 17 июня в 15:11 EDT. Об отсрочке попросили коллеги из проекта LCROSS - чтобы «устранить возможные возмущения, связанные с заправочно-дренажными клапанами Atlas V Centaur». Наблюдатели отметили, что этот последний сдвиг заставил направить LCROSS не в северное, а в южное полушарие Луны, как, собственно, и предполагалось изначально! Уж не придумала ли команда Колапрете причину для переноса? Нет, возмущение от истечения топлива из ступени действительно могло нарушить ориентацию связки и заставить LCROSS израсходовать все свои запасы. 14 мая AV020 вывозили на старт для «мокрого прогона»; все прошло нормально. 21 мая, улучив просвет в грозовых облаках, «голову» доставили в здание VIF, а утром 28 мая она была установлена на ракету. 31 мая и 1 июня были проведены интегральные испытания. 11 июня состоялась «генеральная репетиция», на которой отрабатывались действия стартового расчета. 15 июня прошел смотр летной готовности, на котором LRO был допущен к старту. А вот дата пуска опять оказалась «подвешенной», и виной тому была утечка водорода при заправке внешнего бака «Индевора» (STS-127), случившаяся 13-го числа и повлекшая перенос старта шаттла на четверо суток. 15 июня NASA объявило, что попытается запустить шаттл 17-го, a LRO - 18 июня. В один день они стартовать не могли - не хватало времени на перенастройку средств полигона. Более того, при запуске «Индевора» 17 июня пришлось бы отложить LRO на 19-е. Ранним утром 17 июня шаттлу не суждено было улететь - утечка водорода открылась повторно. И как только стало ясно, что пуска не будет, началась экстренная подготовка полигона к старту LRO. Запуск аппарата LRO
17 июня в 10:02 EDT платформа с РН Atlas V тронулась в направлении стартовой площадки, куда и прибыла спустя 35 минут. 18 июня баллистические условия давали три возможности для старта - в 17:12, 17:22 и 17:32 EDT. В 16:01, когда заканчивалась заправка «Центавра» водородом, метеослужба наложила запрет на пуск из-за прохода грозового фронта. Синоптики обещали, что непогода уйдет через час, и подготовка к старту продолжалась. Однако первое стартовое окно приближалось, а грозовые облака все еще висели над Мысом. Что же придет раньше - просвет или время пуска? В 16:58 было объявлено, что попытка пуска будет предпринята в 17:32, в последний возможный момент. Вскоре метеорологи сообщили, что в ближайшие 10 минут погода может улучшиться. Оказывается, иногда и прогноз погоды не ошибается - в 17:17 EDT представители ВВС дали «добро» на старт. Ровно в 17:32 EDT над побережьем Флориды раздался долгожданный гул двигателя РД-180 - Atlas V благополучно стартовал. Через 14 минут Centaur достиг опорной орбиты наклонением 28.5° и высотой 185 км. Через 36 мин 59 сек пришло сообщение о втором включении, а в Т+41 мин 57 сек - о выключении ЖРД RL10 при скорости около 10.7 км/с. Наконец, в 18:16:43 EDT (22:16:43 UTC) лунный разведчик LRO благополучно отделился от связки Centaur + LCROSS над Индийским океаном. По данным Дж. МакДауэлла (США), аппарат был выведен на вытянутую орбиту ИСЗ с параметрами: - наклонение - 28.2°; - минимальная высота -194 км; - максимальная высота - 353700 км. Сразу же после отделения операторы установили стабильный контакт с LRO через спутник-ретранслятор TDRS, а затем и через наземные станции. Через несколько минут аппарат захватил Солнце и построил ориентацию. К 19:32 была выдана и исполнена команда на развертывание панели СБ (солнечных батарей). В 19:48 пришло сообщение о нормальной работе звездных датчиков и о переводе в рабочее положение антенны HGA. Тем временем связка Centaur + LCROSS сделала маневр уклонения от LRO и продолжала полет, удаляясь от Земли. После входа в зону радиовидимости станции Гуам была произведена закрутка ступени со скоростью 1 об/мин и управляемый слив остатков топлива через сопло с контролем приращения скорости по акселерометру. Затем были стравлены остатки топлива (осталось 14-16 кг кислорода и пара килограммов водорода, но с этим пришлось примириться), сожжены и стравлены остатки гидразина в системе управления и гелий системы наддува. Все эти операции заняли почти четыре часа. Лишь в 21:20 пришло сообщение о подаче питания на LCROSS и о приеме телеметрии с него в Канберре. После необходимой проверки в 21:30 EDT (01:30 UTC) состоялась передача управления от ступени к спутнику. В результате управляемого слива топлива «Центавра» связка перешла на собственную орбиту с параметрами, обеспечивающими необходимые условия облета Луны: - наклонение - 28.0°; - минимальная высота - 133 км; - максимальная высота - 348640 км. Полет LRO
Сразу после раскрытия солнечной батареи LRO инженеры обнаружили некоторое снижение мощности (5-10%) по сравнению с расчетной. Оно не представляло серьезной проблемы, но послужило поводом для беспокойства и пристального изучения. Поздним вечером 18 июня операторы протестировали бортовые двигатели, заодно сбросив момент, накопленный маховиками в ходе отделения и успокоения LRO, и начали подготовку к первой коррекции траектории. 19 июня в 18:16 EDT был осуществлен маневр МСС-1, главным образом с целью коррекции наклонения орбиты. Двигатели были включены на 38 секунд и обеспечили приращение скорости 1.3 м/с. Состояние аппарата контролировала станция DSS-24 в Голдстоуне.
Вечером того же дня были включены приборы CRaTER и LEND для оценки радиационной обстановки на трассе перелета и нагреватели камеры LROC с целью дегазации. Успешно прошел тест радиопередатчика Ка-диапазона с передачей информации на Уайт-Сэндз со скоростью 25 Мбит/с, а вечером 20 июня он был опробован и на 100 Мбит/с. 20 июня в 11:44 аппарат находился в 264 000 км от Земли и двигался со скоростью 914 м/с. (Траектория полета к Луне была выбрана «ленивая», 4.5-суточная.) 22 июня в 12:58 LRO поднялся до 352 000 км и двигался с «черепашьей» скоростью 245 м/с. Отсюда он начал разгоняться под действием тяготения Луны. 22 июня около 23:00 EDT была проведена «генеральная репетиция» выхода на окололунную орбиту под названием LOI-E (Lunar Orbit Injection - Engineering). Все предварительные операции были выполнены штатно, но двигатели спутника включили лишь на 30 секунд. На подлете к Луне LRO сориентировался и 23 июня в 05:47 EDT включил все четыре 20-фунтовых двигателя на 40 минут. Для выхода на устойчивую орбиту было бы достаточно и половины этого времени или половины двигателей, но все они отработали штатно, снизив скорость КА примерно на 590 м/с, и в 06:26:28 выключились. Специалисты зафиксировали выход на начальную окололунную орбиту наклонением 30° и высотой периселения 220 км и апоселения 3100 км. В тот же день участников проекта ждала и первая неприятность: в 11:50 EDT спутник «свалился» в защитный режим из-за ошибки звездного датчика, вызванной частичным затенением неба Луной. Ситуацию удалось быстро парировать, и в 12:28 EDT аппарат снова был в обсервационном режиме. В тот же день были вновь включены CRaTER и LEND. 24 июня в 06:56 EDT была проведена коррекция LOI-2 длительностью 12 минут, после которой высота орбиты составила 200x1680 км. 25 июня в 06:32 EDT последовал маневр LOI-3 длительностью 13 минут. Он обеспечил переход на орбиту наклонением 89.93° и высотой 199x740 км. 26 июня в 08:25 EDT был выдан 10-минутный импульс LOI-4, после которой LRO оказался на круговой 200-километровой орбите. Наконец, 27 июня в 08:34 EDT был начат последний маневр LOI-5. Длительность работы двигателей составила 230.8 сек, а приращение скорости - 36 м/с. В результате LRO перешел на «квази-замороженную» орбиту наклонением 90.2° и высотой 31x199 км с периселением над южным полюсом. До полета называли расчетную высоту 30x216 км, но разница была не принципиальна. Достоинство этой орбиты, на которой в течение примерно 60 суток будет осуществляться проверка и калибровка научных инструментов, - в том, что на поддержание ее параметров требуется всего 5 кг топлива в год. А вот на рабочей круговой орбите высотой 50 км LRO будет испытывать значительные возмущения и без коррекций просто упадет на Луну через 2-3 месяца. Для удержания высоты орбиты в пределах 35-65 км потребуется годовой расход топлива около 90 кг. Именно этим определяется продолжительность работы КА по основной программе, которая начнется в августе и продлится 12 месяцев. 28 июня LRO построил штатную ориентацию приборами в надир. 30 июня была включена камера LROC, которая уже 2 июля сделала первые снимки горного района Луны южнее Моря Облаков. Приборы LOLA, Diviner и Mini-RF планируется ввести в работу в начале июля, и лишь LAMP, особено чувствительный к загрязнениям, будет выдерживаться еще несколько недель. После окончания годовой миссии LRO будет передан в подчинение Директората научных программ NASA для дополнительной цикла исследований по программе Национальной академии наук США. Эта последняя фаза может продлиться до трех лет, если использовать остатки топлива КА для возвращения на «квази-замороженную» орбиту. На штатной орбите, судя по дополетным расчетам, их хватит максимум на пять месяцев. Впрочем, в конце 2010 г. наступает период полных лунных затмений, и одно из них, 15 июня 2011 г., с продолжительностью полной фазы 101 мин, может повлечь гибель LRO из-за разряда батарей. Полет LCROSS
С момента приема управления от ступени LCROSS работал по своей программе, независимо от LRO. На трассе перелета к Луне он выполнил три коррекции траектории связки Centaur + LCROSS. Первая из них исправила ошибки выведения: два пятифунтовых двигателя КА включились 19 июня в 19:15 EDT на 580 сек и выдали приращение скорости 8.06 м/с. Вторая состоялась ровно через сутки. Centaur вел себя «прилично» - он выпустил все остатки топлива за первые двое суток полета и более ориентацию не возмущал. А вот на LCROSS была выявлена неисправность - при снижении температуры не включался подогрев некоторых ЖРД. Пришлось повернуть связку на 20° от направления на Солнце, чтобы оно подогревало пострадавшие движки. Потом операторы решили выяснить, можно ли увеличить этот угол без последствий по тепловому режиму, но в процессе эксперимента звездный датчик ST-A увидел край Земли и вырубился. К моменту третьей коррекции 22 июня восстановить его не успели, к тому же в самый неподходящий момент произошел сбой на наземной станции сети DSN. В итоге набор команд для коррекции ушел на борт за 10 минут до ее начала! 23 июня в 06:30:33 EDT связка прошла на минимальном удалении в 3200 км от Луны. Принимаемые на этапе подлета снимки с разных приборов LCROSS в реальном масштабе времени размещались в Интернете. Во время пролета аппарат провел сканирование кратеров Менделеев, Годдард-С и Джордано Бруно для калибровки камер и спектрометров и двух участков лунного горизонта для проверки соосности инструментов. Совершив пертурбационный маневр, подобно «Луне-3» полвека назад, связка вышла на орбиту вокруг барицентра системы «Земля-Луна», плоскость которой наклонена на 80° по отношению к эклиптике, высота составляет примерно 357000x582000 км, а период обращения близок к 37 суткам. По этой орбите аппарат должен сделать три полных витка с прохождением апоцентра 10 июля, 16 августа и 22 сентября, а 9 октября 2009 г. вблизи перицентра вновь встретиться с Луной. Это эпохальное событие должно состояться в 07:30 EDT (11:30 UTC). Точное место «бомбардировки» Луны будет выбрано примерно за 30 суток до этого. Это может быть кратер Шумейкер, Фаустини или Кабей, который сегодня считается «фаворитом». Окончательное прицеливание обеспечат коррекции за 72 и 11 часов до столкновения.
За 9 час 40 мин до попадания на высоте около 87000 км от поверхности Луны LCROSS отделяется от «Центавра», осуществляет программный разворот на 180° для ориентации научной аппаратуры в нужном направлении и подтормаживает двигателями, чтобы слегка отстать от «Центавра». Приборы LCROSS включаются за час до удара. Ожидается, что оба объекта врежутся в Луну с интервалом 4 минуты - сначала главный «таран» длиной 12.68 м и массой от 2149 до 2336 кг, а затем и аппарат-наблюдатель массой от 621 до 866 кг (в зависимости оттого, как будет проходить полет и сколько топлива придется израсходовать на коррекции). По требованиям LCROSS должен обеспечить попадание в заданную точку с точностью не хуже 10 км; реальная точность наведения ожидается на уровне 1.2 км. Скорость двух объектов в момент соударения с Луной будет составлять 2.5 км/с, угол наклона траектории - 60-80°. Предполагается, что удар «Центавра» вызовет выброс 350 тонн лунного грунта на высоту до 10 км, а на месте падения образуется кратер диаметром 20-25 м и глубиной 4-5 м. Последствия удара LCROSS будут меньшими: 150 тонн грунта и кратер диаметром 14 м и глубиной 2 м. Вспышка, как ожидается, будет иметь продолжительность около 100 мс. Разумеется, такой эксперимент не мог не привлечь внимание астрономов, как профессиональных, так и любителей. Подготовка скоординированных наблюдений идет полным ходом. Наблюдать падение ступени и LCROSS предполагается на астрономических спутниках HST, Odin и SWAS и на лунных КА Chandrayaan-1 и LRO. Обсерватория имени Кека Юго-Западного исследовательского института будет вести наблюдение водяных паров, измерение размера частиц и определение состава выброса. Его же специалисты займутся и получением мультиспектральных изображений. Визуальное наблюдение выброса грунта будет вести обсерватория Apache Point в Нью-Мексико. Поиски следов водяного льда возложены на обсерваторию Университета Аризоны. По расчетам, выброс лунного грунта смогут увидеть и любители с телескопами диаметром 25-30 см и более. Автор: И. СОБОЛЕВ,
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||



|
|