Краткое описание картинки:
Марсоход Curiosity 17 октября 2017 года провел тестирование в рамках разработки командой миссии новых способов использования бура ровера. Снимок с передней контрольной камеры HazCam (камера контроля окружающей обстановки) демонстрирует момент касания бура на манипуляторе ровера поверхности Марса. Марсоход Curiosity использовал свой бур для получения образцов марсианских пород 15 раз с 2013 по 2016 год. В декабре 2016 года механизм бура перестал стабильно работать. Во время испытаний, продемонстрированных на этом снимке, ровер впервые за 10 месяцев коснулся буровым долотом поверхности. Затененные участки на изображении осветлены. Съемка велась в течение 1848го марсианского дня миссии на Марсе.
При использовании бура до декабря 2016 года два контактных стержня (стабилизаторы с обоих сторон от долота) сначала фиксировались на поверхности, при этом долото находилось в отведенном положении. Затем моторизированный механизм подавал буровое долото вперед, а вращение и ударные воздействия помогали проникать вглубь горной породы. В настоящее время тестируется способ «расширенной подачи», при котором буровое долото подается и сверлит породу под давлением руки манипулятора. На снимке видно, что бур касается поверхности без фиксации боковыми стержнями стабилизаторами. Для сравнения приведем снимок аналогичной процедуры до 2016 года:

Во время тестов на 1848 сол марсоход Curiosity манипулятором давил на буровое долото направляя его вниз, одновременно проводя измерения с помощью датчиков. Цель состояла в том, чтобы определить, как показания датчиков могут быть использованы во время бурения для корректировки любых боковых отклонений, которые могут привести к застраиванию долота в скале.

 Исследователи
Исследователи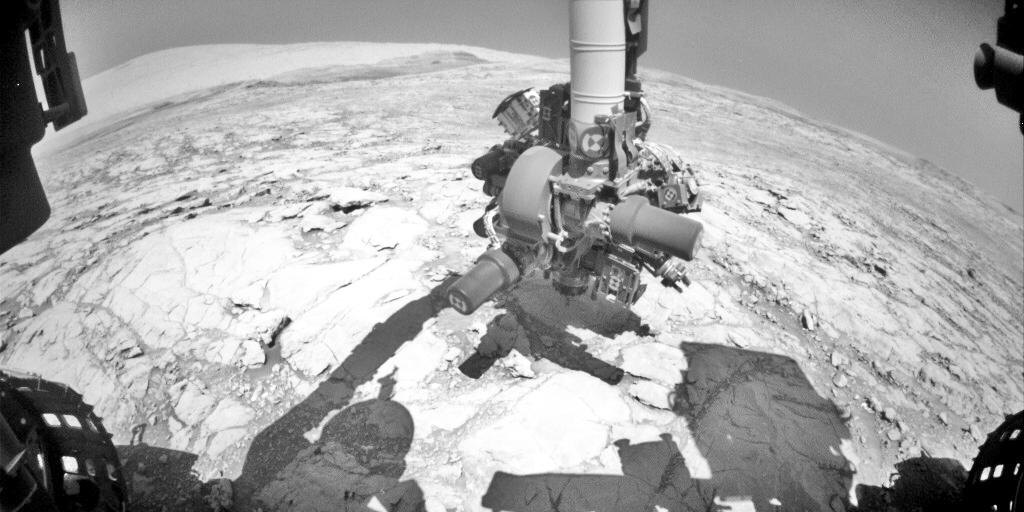
 Подготовка к взятию проб на Марсе
Подготовка к взятию проб на Марсе
