Краткое описание картинки:
В январе 2006 года команда управления ровером Opportunity приняла новую стратегию в использовании автоматической руки ровера (порвался один из проводов сочленения руки) и в дальнейшем продвижении по планете с наполовину сложенным инструментом. Ровер теперь перемещается так как это показано на данном изображении ("локтем" вперед), полученном навигационной камерой на 706 сол (18 января 2006). В этой позиции спектрометр Moessbauer направлен вверх, рентгеновский спектрометр направлен вправо, а инструмент для трения скалы - влево. Поломка провода сочленения руки произошла на 654 сол ровера (25 ноября 2005), и была выявлена во время диагностики. Из-за поломки ровер не может полностью сложить (убрать) руку при перемещении по планете.

 Исследователи
Исследователи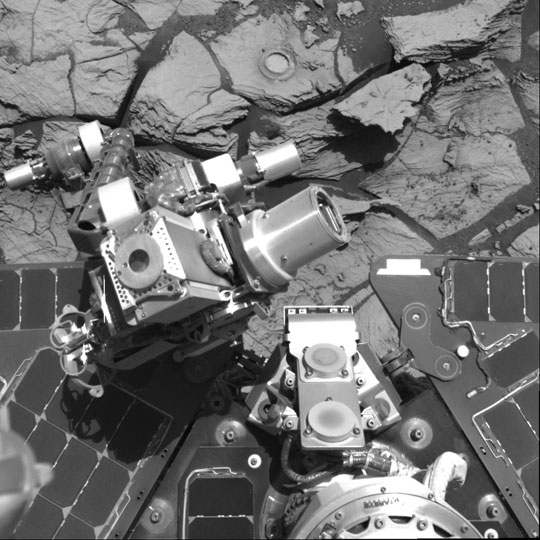
 Автоматизированная рука ровера
Автоматизированная рука ровера
